200 mm 定焦镜头教程(A 部分):加载、检查并运行基线光线追迹
1. 引言

定焦镜头是焦距固定的镜头,与变焦镜头不同,后者的 焦距可连续变化(见 ??)。 定焦镜头在摄影与成像系统中被广泛使用,因为设计可以围绕 单一焦距进行优化:与规格相近的变焦镜头相比,定焦镜头 通常在光学上更简单,往往支持更大的可用光圈,并且在相同 尺寸与成本下能够提供更干净的离轴性能。在本教程中,我们使用一支 200 mm 定焦镜头作为 以几何为先的“读光线”练习:目标不是 merit function,而是学习如何快速发现 错误的光阑位置、非预期的截光,以及探测器平面位置不正确的问题。
在本教程中,我们使用一支 200 mm 定焦镜头来演示如何在 3D 中检查多片 摄影镜头,运行基线光线追迹,并对输出进行定性解读。 目标不是用 merit function 去“评分”该镜头;而是学习如何阅读 几何结构与光线路径,从而快速发现截光、光阑位置不当,以及 离轴敏感性。
本教程的工作流与专业光学设计中的标准实践一致: 在引入任何优化或定量的 merit function 之前,首先通过检查光线路径、光阑位置与探测器 行为对镜头模型进行几何验证。如果模型无法通过这些检查,数值指标是没有意义的。
2. 加载 200 mm 定焦镜头示例
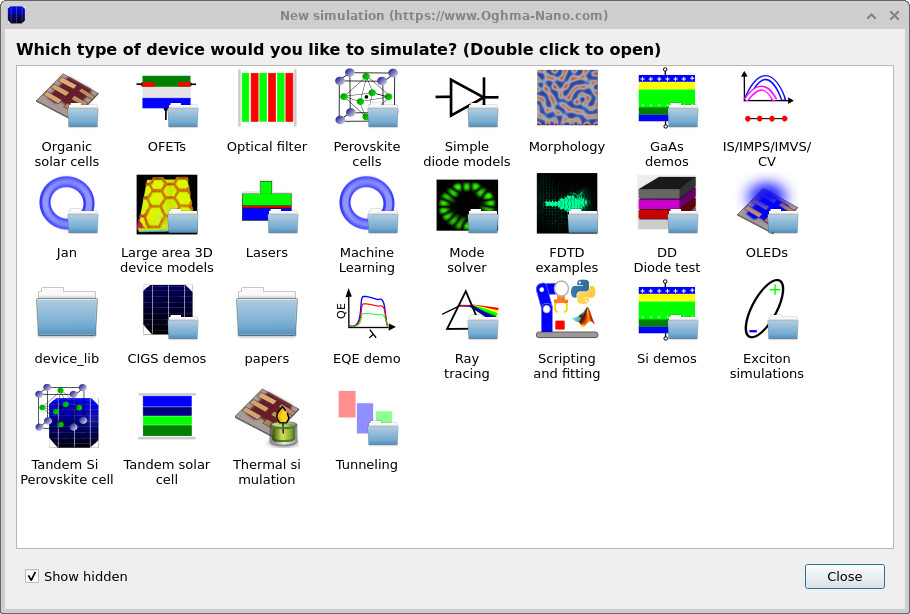
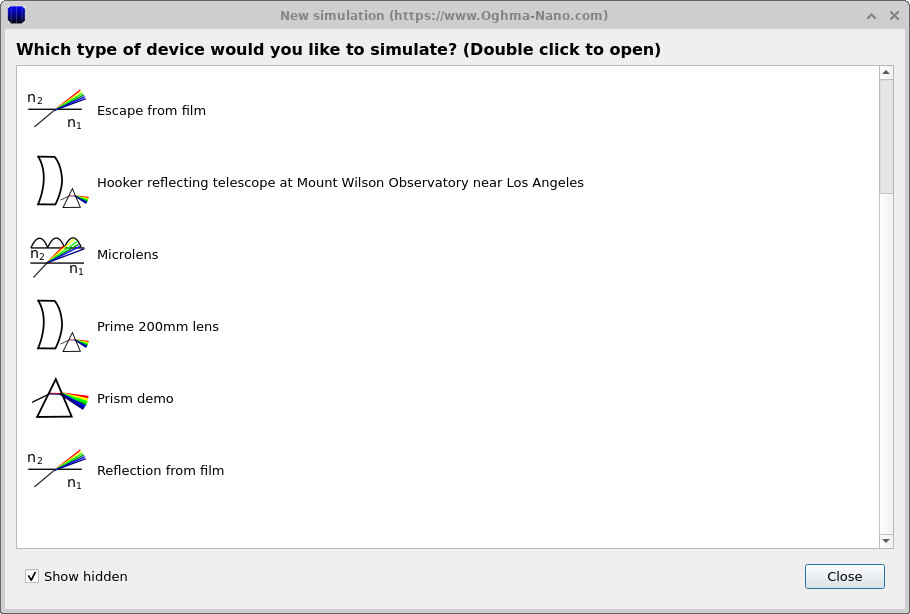
在主窗口中点击 New simulation。这将打开仿真库 (??)。 双击 Ray tracing 进入光学示例 (??), 然后选择 Prime 200mm lens(或 200mm prime lens)并选择一个工作目录 (例如,你的主目录)。
3. 在 3D 场景中定位自己,运行基线光线追迹
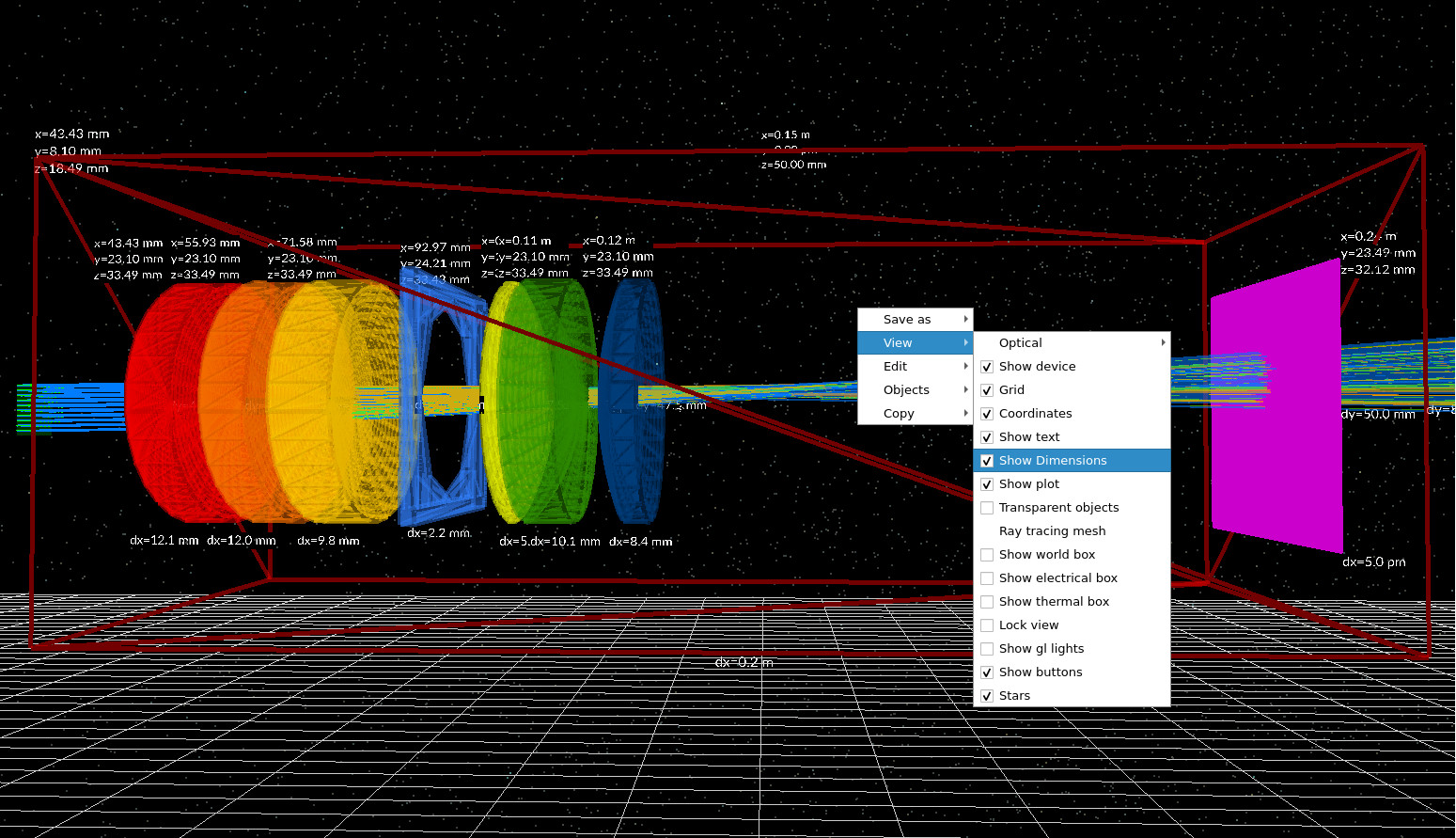
加载完成后,Optical Workbench 应以类似于 ?? 的视图打开。 光轴从左到右。左侧你应看到一个或多个 光源 (绿色),中间是 透镜元件(彩色玻璃表面),右侧是 探测器平面(紫色)。
对于该设计,你可以将其理解为“前组光学”加上“靠近探测器的后段”: A 部分的关键只是识别 (i) 主透镜元件,(ii) 光阑/孔径对象, 以及 (iii) 探测器平面。(如果你好奇:该演示所基于的公开远摄设计 使用可移动的物镜段,以及一个相对于胶片/传感器平面固定的后校正元件。)
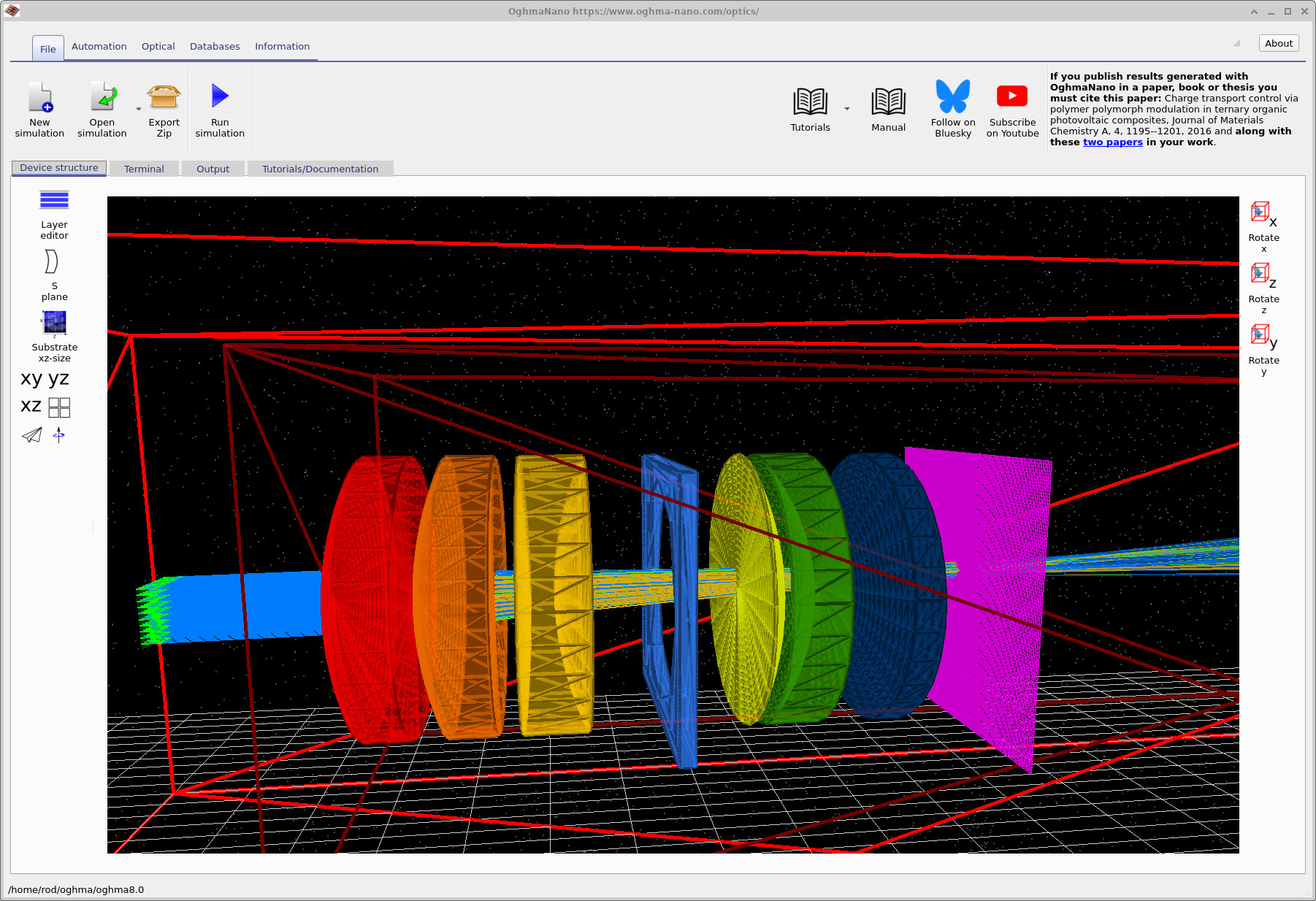
用鼠标进行探索:在黑色背景上拖动以旋转视图,并检查元件间距。 目标是在运行任何东西之前,你能够自信地通过目视定位光阑与探测器。
点击 Run simulation(主工具栏中的蓝色三角形)。运行完成后,你应看到 光线从光源发出,穿过完整的镜头堆栈,并落到探测器平面上(见 ??)。
4. 定位并打开关键输出
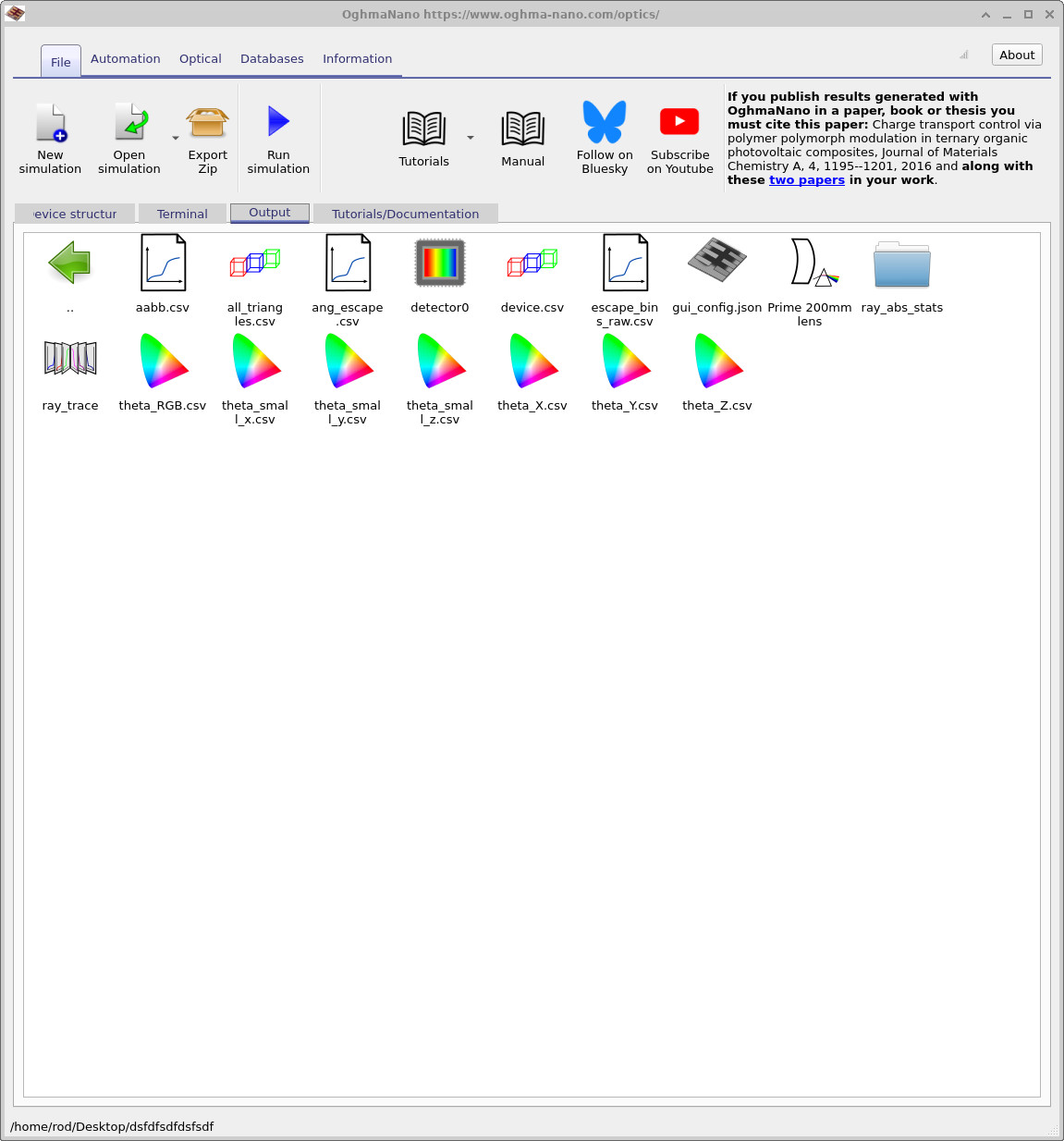
切换到 Output 选项卡。你应看到一个探测器文件夹(通常为 detector0)以及
相关的光线追迹输出(示例见
??)。
每个探测器都有自己的输出目录:打开 detector0(它以“相机/CCD”图标显示)。
detector0。
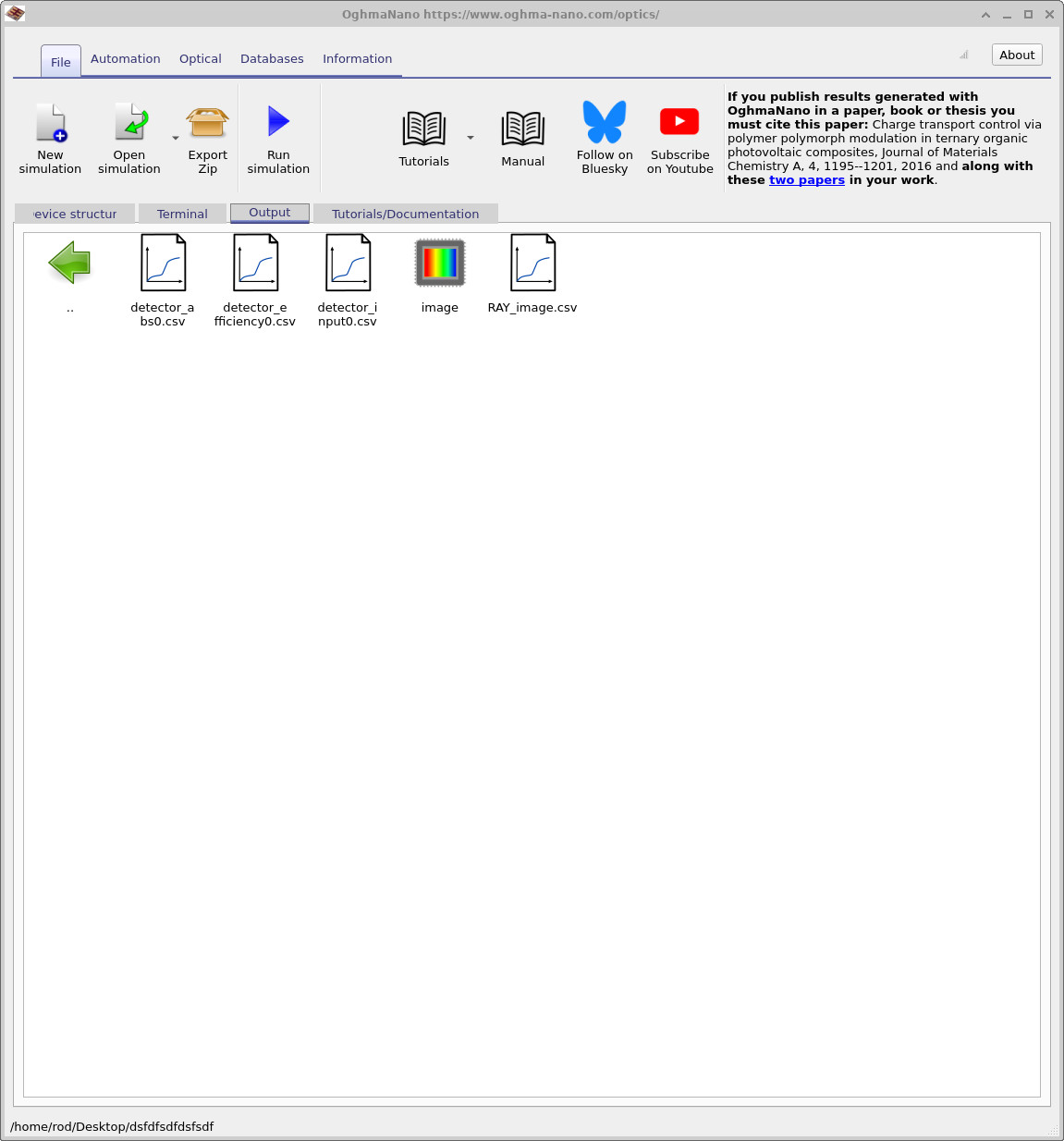
detector0 内部。打开 RAY_image.csv。
打开 detector0 后,你应看到包括 RAY_image.csv 在内的文件
(示例见 ??)。
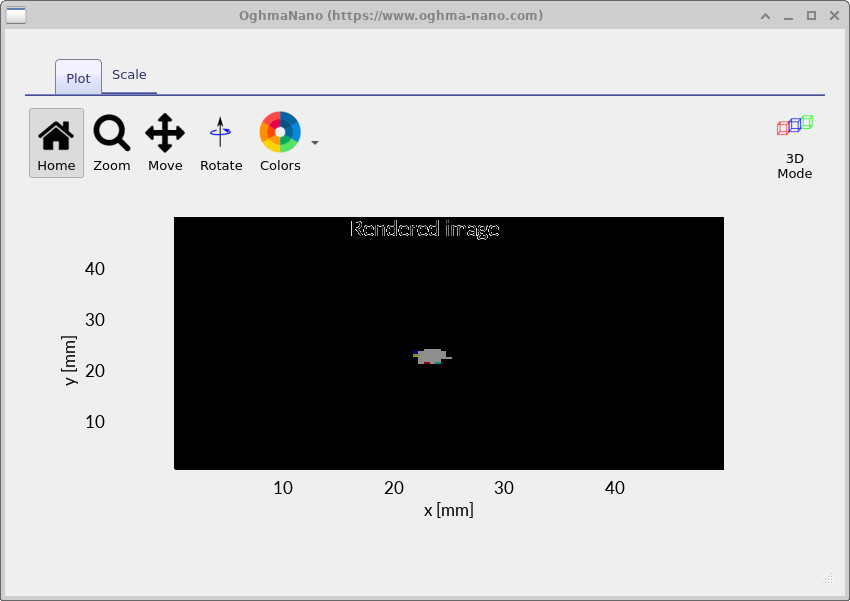
双击 RAY_image.csv 以查看探测器图像。
在真实相机中,该探测器平面对应传感器/胶片平面:也就是说,在现代数码相机中,
你会在放置于该平面的 CMOS/CCD 传感器上形成该图像。
一个快速的对焦合理性检查(移动探测器平面)
建立直觉的最快方式是移动 探测器平面,而不是移动透镜元件。 从概念上讲,这相当于让传感器相对于镜头前后移动,并观察模糊如何变化。 你的目标是通过肉眼找到使探测器上光斑最小的探测器位置。
首先,启用屏幕尺寸标注。在黑色背景上右键单击,选择 View,并启用
Show dimensions(见
??)。
你现在应该能看到对象的 x/y/z 位置以及厚度/长度(显示为 dx 等)。
现在沿光轴前后移动探测器平面,并观察光斑如何变化。 为了得到清晰演示,将其移动到极端位置(明显过于靠前,然后明显过于靠后),然后 寻找光斑最小的位置。你可以在每次更改后重新运行仿真, 或者(用于快速定性检查)直接观察光线在探测器平面上的交点如何移动。
“最佳焦点”是否就是光斑最小的位置? 对本教程而言:是的——将最小 足迹视为最佳合焦条件。(之后,诸如 RMS 光斑半径等指标会将这一思想形式化, 但学习以几何为先的工作流并不需要它们。)
如果你想得到“传感器到最后一片元件的距离”的数值,你可以直接从屏幕几何中估算:
读取最后一片透镜元件的 x 坐标(其参考位置),加上其厚度 dx,
然后从探测器平面的 x 坐标中相减。这样可得到最后一片元件后表面与探测器平面之间的
近似间距。在你通过目视得到的最佳合焦位置重复该操作并记录数值。
你现在可以做什么(A 部分)
- 加载并导航 Optical Workbench 中的 200 mm 定焦镜头演示。
- 运行基线光线追迹 并确认光线到达探测器平面。
- 打开输出 并查看
detector0/RAY_image.csv作为快速合理性检查。 - 通过肉眼找到最佳焦点:移动探测器平面并寻找最小光斑。
若输出看起来“不对”,常见检查项
- 确认探测器平面位于镜组之后并朝向光束。
- 若 3D 视图过于杂乱,降低光线密度。
- 检查你打开的是正确的探测器文件夹(对应 3D 场景中的洋红色平面)。
- 如果移动探测器完全不改变光斑尺寸,重新检查光线是否确实与探测器相交。
👉 下一步:继续阅读 B 部分,识别主光线与边缘光线, 通过目视诊断截光/渐晕,并建立“无指标”的镜头合理性检查工作流。