1.Mallado
1. ¿Qué es el mallado?
El mallado es el proceso de dividir una región física continua en un conjunto de puntos discretos que pueden ser manejados por un ordenador. Por ejemplo, imagine el calor fluyendo a lo largo de una barra metálica desde la llama de una vela en un extremo hasta un bloque de hielo en el otro. En realidad, la temperatura varía continuamente a lo largo de la barra, pero una simulación no puede almacenar infinitos valores. En su lugar, la barra se representa mediante un número finito de puntos de muestreo (una malla), y los cálculos se realizan solo en esas ubicaciones (véase ??). Al trabajar con una malla, convertimos un problema que de otro modo sería continuo en uno discreto que puede resolverse mediante métodos numéricos. Este principio sustenta diferencias finitas, elementos finitos y otros enfoques computacionales ampliamente utilizados en física e ingeniería.

2. Diferentes mallas para diferentes problemas



En OghmaNano se resuelven tres modelos físicos principales: el modelo óptico (absorción y propagación de la luz), el modelo térmico (generación y flujo de calor) y el modelo eléctrico (transporte de carga y recombinación). Cada uno de estos procesos suele ocurrir en escalas de longitud muy diferentes, por lo que cada uno requiere su propia malla. Por ejemplo:
- Célula solar orgánica: Los efectos eléctricamente relevantes se concentran en la capa activa (≈100 nm de espesor), por lo que las ecuaciones de deriva–difusión solo necesitan resolverse allí. Sin embargo, la luz interactúa con todas las capas de la pila del dispositivo (≈1 µm de espesor), por lo que el problema óptico debe resolverse en todo el dispositivo. En este caso, la malla óptica abarca toda la pila, mientras que la malla eléctrica se centra en la capa activa.
- Diodo láser de pozo cuántico: El dispositivo puede generar calor significativo en sus pozos cuánticos (≈30 nm de espesor) y en las capas de guía de onda (≈1 µm de espesor), pero este calor finalmente se disipa a través de un gran disipador térmico de cobre con un espesor de centímetros. Aquí, los efectos eléctricos deben modelarse en la escala de nanómetros a micrómetros dentro del dispositivo, mientras que los efectos térmicos requieren una malla que se extienda hasta la escala centimétrica del disipador térmico.
En la práctica, esto significa que diferentes efectos físicos deben simularse en diferentes escalas de longitud. Además, las estructuras de los dispositivos suelen incluir capas de contacto o de interfaz muy finas de solo unos pocos nanómetros de espesor. Ópticamente, tales capas están muy por debajo de la longitud de onda de la luz y a menudo pueden ignorarse, pero eléctricamente son críticas porque determinan el comportamiento corriente–voltaje del dispositivo. Para capturar estos efectos, utilizaría una malla eléctrica muy fina en esas regiones, mientras que la malla óptica puede seguir siendo más gruesa y abarcar por encima de ellas.
OghmaNano interpola automáticamente entre mallas al acoplar modelos. Por ejemplo, si define un perfil térmico en la malla térmica pero el solver eléctrico requiere valores locales de temperatura, estos se transfieren mediante interpolación. Lo mismo se aplica a magnitudes ópticas como la tasa de generación de portadores, que se interpolan desde la malla óptica a la malla eléctrica según sea necesario. Como usuario, no necesita gestionar manualmente estas transferencias.
3. Las tres mallas de OghmaNano
OghmaNano proporciona tres mallas independientes: térmica, óptica y eléctrica, que pueden definirse por separado según el problema que se esté resolviendo. Se accede a cada malla desde su pestaña de cinta correspondiente, como se muestra en la Figura ??.
3.1 Malla eléctrica
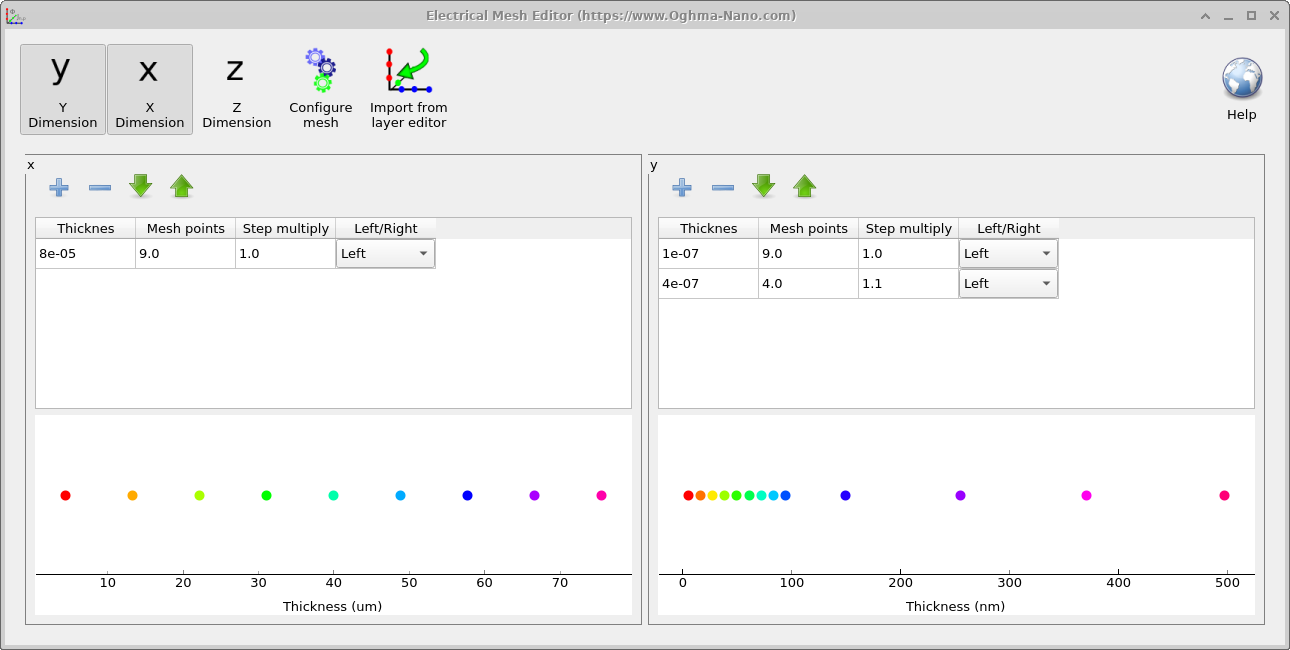
Al hacer clic en el botón Electrical mesh de la cinta Electrical se abre la ventana del editor de malla (??). En la parte superior de esta ventana están los botones X, Y y Z. Estos activan qué dimensiones espaciales están activas en la simulación. Por ejemplo, activar solo Y habilita una simulación 1D, mientras que habilitar X y Y juntos configura una simulación 2D. En el ejemplo mostrado, tanto X como Y están activos, por lo que la malla está configurada para una simulación 2D de OFET. Las tablas centrales funcionan como hojas de cálculo y definen la estructura de la malla para cada dimensión activa. Sus columnas principales son:
- Thickness: el espesor físico de cada región de la malla.
- Mesh points: el número de puntos de discretización en esa región.
- Step multiply: cuánto crece el espaciado de la rejilla dentro de la región.
Por ejemplo, un valor de
1.1incrementa cada paso en un 10% con respecto al anterior. - Left/Right: establece el lado del dispositivo a partir del cual se genera la malla.
Las mallas resultantes se representan en los gráficos de la parte inferior de la ventana, proporcionando retroalimentación inmediata sobre el espaciado y la distribución de puntos. El botón Import from layer editor proporciona un acceso directo para dispositivos complejos. Limpia la malla Y e importa automáticamente todas las capas desde el Editor de capas, asignando cuatro puntos de malla por capa. Esto es especialmente útil para estructuras con muchas capas, como los diodos láser.
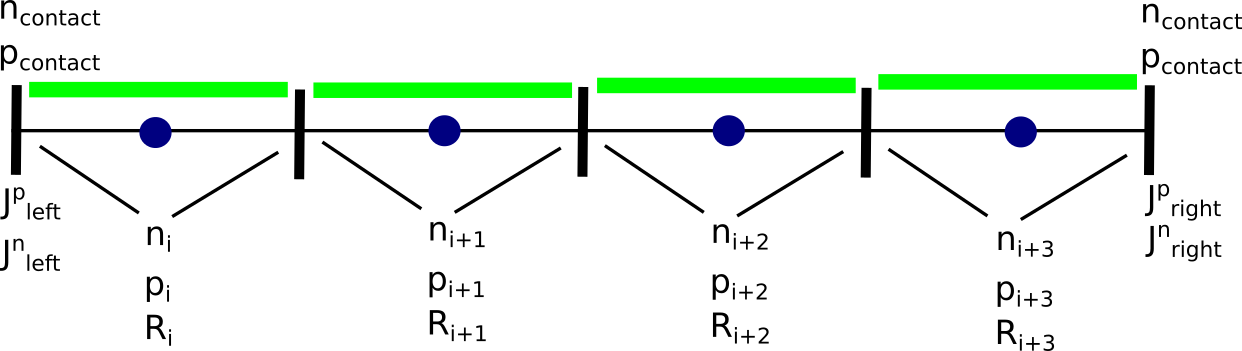
La malla eléctrica en detalle: ?? ilustra cómo se construye la malla eléctrica. La malla no comienza exactamente en el límite del dispositivo, sino que empieza medio espaciado de malla dentro del dispositivo. Esto asegura que el primer nodo computacional se encuentre dentro de la región activa de simulación, permitiendo que las condiciones de contorno (por ejemplo, contactos eléctricos) se apliquen en posiciones bien definidas justo fuera de la malla. La misma convención se aplica en el borde opuesto del dispositivo, de modo que la malla se extiende medio paso más allá del punto físico final.
- Evita problemas numéricos que surgen al intentar evaluar derivadas directamente en los contornos.
- Sitúa el primer y el último punto de malla en posiciones que representan mejor el interior físico del dispositivo, mientras sigue permitiendo imponer condiciones externas de forma consistente.
Mallado automático: Los espesores de capa se definen en el editor de capas. Después de definir la estructura física del dispositivo, el usuario debe actualizar la malla eléctrica para que la geometría de la malla coincida con las dimensiones físicas del dispositivo. En la práctica, los usuarios nuevos a menudo no se dan cuenta de que la malla eléctrica, como cualquier representación CAD, debe ser consistente con el tamaño físico del objeto.
Para reducir errores de configuración, OghmaNano aplica suposiciones de mallado automático en tiempo de ejecución. La simulación asume que los anchos y alturas de capa especificados en el editor de capas son correctos e intenta mapear estas dimensiones sobre la malla eléctrica automáticamente. Por ejemplo, si un dispositivo consiste en una sola capa y la altura correspondiente de la malla es incorrecta, la simulación utilizará internamente el espesor de capa del editor de capas al construir la malla.
Si el número de capas del dispositivo coincide con el número de capas verticales de la malla, cada capa de la malla se asocia automáticamente con el espesor de la capa correspondiente del dispositivo. Estos ajustes se aplican internamente durante la simulación y no modifican los parámetros visibles de la malla en el editor. Si el número de capas de la malla no coincide con el número de capas activas del dispositivo, o si la correspondencia es ambigua, no se aplica el mallado automático y la simulación finalizará con un error indicando que la definición de la malla es inconsistente con la estructura del dispositivo.
3.2 Malla óptica
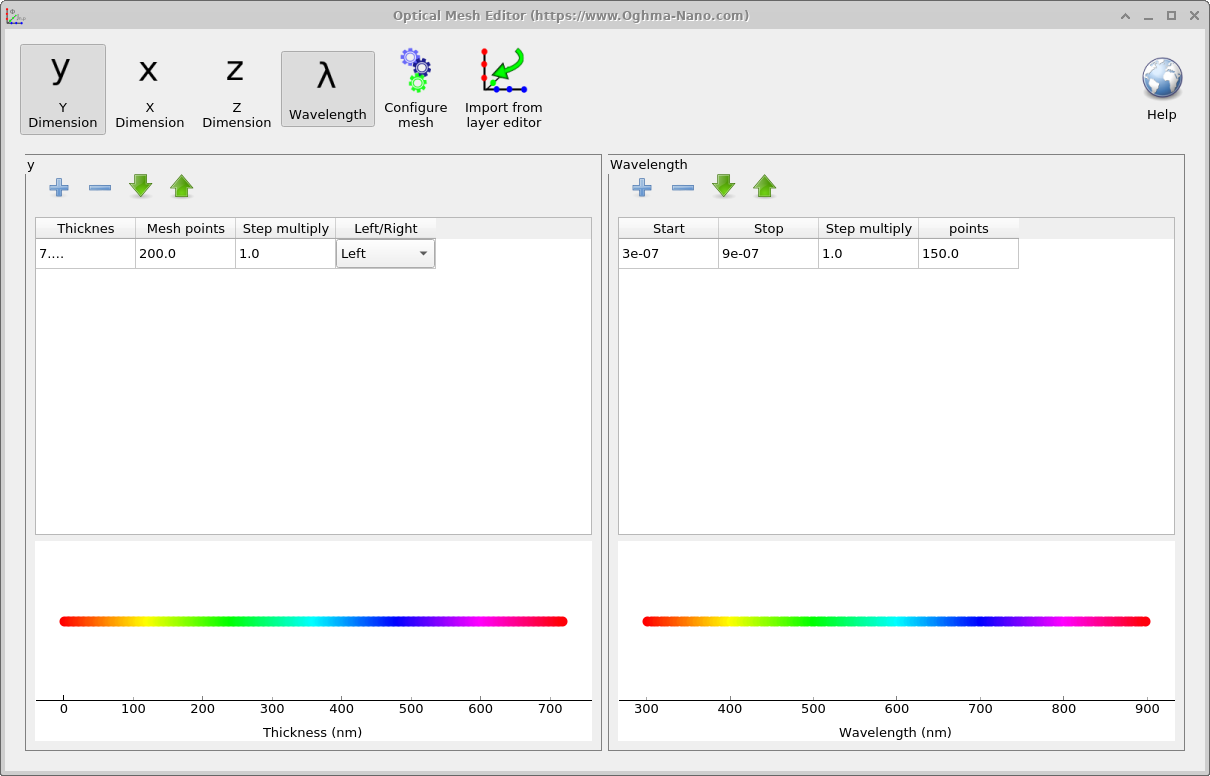
El editor de malla óptica (??) es similar en diseño al editor de malla eléctrica, pero incluye un panel adicional para definir la malla de longitudes de onda. En la parte superior de la ventana, los botones X, Y y Z activan qué dimensiones espaciales están activas, mientras que el botón λ (Wavelength) habilita la rejilla espectral.
El panel izquierdo especifica la discretización espacial en nanómetros, utilizando las mismas columnas que la malla eléctrica (Thickness, Mesh points, Step multiply y Left/Right). El panel derecho define el rango espectral estableciendo las longitudes de onda Start y Stop, el número de points y el multiplicador de paso. Estos puntos de longitud de onda se utilizan de forma consistente en todos los solvers ópticos, incluidos ray tracing, FDTD y simulaciones de transfer matrix.
Mallado automático: Para las simulaciones ópticas, el software intentará ajustar automáticamente la malla óptica para que sus dimensiones sean consistentes con el problema óptico. En simulaciones bidimensionales o tridimensionales más complejas, si las mallas óptica y eléctrica no coinciden, el solver intentará actualizarlas automáticamente. Si esto no es posible, o si la configuración de malla prevista no puede determinarse de forma inequívoca, la simulación finalizará con un error claro indicando que las definiciones de malla son inconsistentes.
3.3 Malla térmica
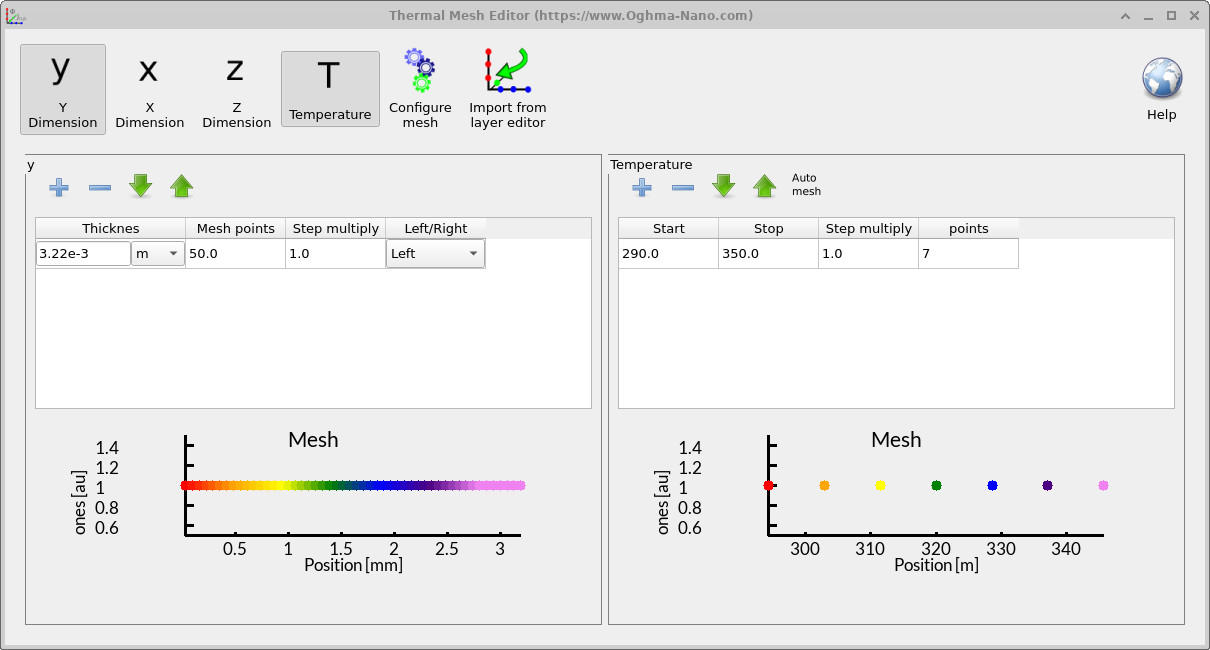
El editor de malla térmica (??) funciona de la misma manera que los editores de malla eléctrica y óptica, con botones X, Y y Z para activar dimensiones espaciales. Además, incluye una malla dedicada de T (Temperature).
La malla de temperatura se utiliza siempre que las simulaciones necesiten tener en cuenta la dependencia con la temperatura, por ejemplo al habilitar el auto-calentamiento o al evaluar propiedades eléctricas en un rango de temperaturas. Antes de que la simulación se ejecute, OghmaNano precalcula y tabula magnitudes como densidades de portadores frente a nivel de Fermi y temperatura, o integrales de Fermi–Dirac. Estas tablas permiten que el solver consulte rápidamente valores durante la ejecución, en lugar de calcularlos repetidamente.
En la mayoría de los casos, la malla térmica se gestiona automáticamente, pero los usuarios avanzados pueden ajustar el rango y la resolución para garantizar suficiente precisión en problemas con fuerte dependencia de la temperatura.
4. ¿Cuándo necesito preocuparme por el mallado en OghmaNano?
Malla eléctrica: El Editor de capas divide un dispositivo en capas de diferentes materiales (véase la Sección 3.1.3). Las capas marcadas como active son aquellas sobre las que se aplica el modelo eléctrico. Para estas capas, debe definirse una malla de diferencias finitas. La longitud de la malla debe coincidir exactamente con la longitud de la capa activa; de lo contrario se producirá un error. OghmaNano normalmente generará automáticamente una malla adecuada, por lo que para la mayoría de los dispositivos simples esto no requiere intervención manual. Sin embargo, cuando hay múltiples capas activas presentes, o cuando es necesario reducir el número de puntos de la malla para acelerar una simulación (o aumentarlo para lograr mayor precisión), puede ser necesario configurar manualmente la malla eléctrica.
Malla óptica: La malla óptica controla tanto el muestreo espacial como el de longitud de onda. Puede que sea necesario ajustarla para cambiar el rango de longitudes de onda simulado o para refinar cómo la luz interactúa con diferentes capas del dispositivo. Aumentar el número de puntos de la malla mejora la precisión óptica, pero incrementa el tiempo de simulación.
Malla térmica: La malla térmica solo es relevante cuando el auto-calentamiento está habilitado. En este caso, proporciona la resolución necesaria para modelar las variaciones de temperatura a través del dispositivo y el acoplamiento de los efectos térmicos con las trampas y los procesos de recombinación. En caso contrario, OghmaNano la gestiona automáticamente.
5. Consejos de mallado
¿Debería estar simulando en 1D, 2D o 3D?
Elegir la dimensionalidad correcta es una de las decisiones más importantes al configurar una simulación. Utilice siempre el número mínimo de dimensiones necesario para capturar la física de interés; esto ahorra tiempo y recursos computacionales.
- Células solares: Normalmente solo requieren mallas 1D, ya que las variaciones se producen principalmente en la dirección vertical (espesor).
- Filtros ópticos: También suelen ser 1D, ya que la interferencia óptica clave ocurre en la dirección de la pila.
- OFETs: Requieren 2D, ya que debe resolverse tanto el flujo vertical de corriente a través del semiconductor como la corriente lateral entre fuente y drenador.
Velocidad frente a precisión
Es tentador suponer que añadir más puntos de malla siempre mejora la precisión. En la práctica, más puntos pueden ayudar, hasta cierto punto, pero también pueden hacer que una simulación sea menos precisa o menos estable. El factor limitante a menudo no es la potencia bruta de cálculo, sino el condicionamiento numérico: muchas simulaciones de dispositivos contienen cantidades que difieren en muchos órdenes de magnitud (por ejemplo, densidades o tasas de recombinación muy pequeñas junto con campos, corrientes o dopajes muy grandes). Debido a que los ordenadores utilizan aritmética de precisión finita, las operaciones que implican números extremadamente grandes y extremadamente pequeños pueden perder cifras significativas. Esta pérdida de precisión puede dominar el presupuesto de error y puede desencadenar oscilaciones espurias, corrientes ruidosas o una mala convergencia.
Aumentar la densidad de la malla puede empeorar este problema, no mejorarlo. Una malla más fina a menudo introduce gradientes locales más pronunciados, términos derivados más grandes y un acoplamiento más fuerte entre nodos vecinos, lo que puede aumentar la dispersión entre los números más pequeños y más grandes del sistema lineal que debe resolverse. El resultado puede ser un problema peor condicionado, donde el solver lucha por distinguir la física real del ruido numérico. En tales casos, una malla ligeramente más gruesa puede producir campos más suaves, mejor condicionamiento y, por tanto, resultados más fiables, aunque contenga menos puntos.
Un buen flujo de trabajo consiste en comenzar con una malla gruesa para validar la configuración y confirmar que el comportamiento cualitativo es correcto, y luego refinar solo lo necesario. El refinamiento de la malla debe estar guiado por evidencia: si las salidas clave (p. ej. curvas JV, perfiles de portadores, generación óptica) dejan de cambiar de forma significativa al añadir puntos adicionales, es poco probable que un refinamiento posterior mejore la precisión.
Al configurar un dispositivo en OghmaNano, tenga en cuenta las siguientes directrices:
- Utilice la dimensionalidad mínima: 1D siempre que sea posible; pase a 2D/3D solo cuando la física lo requiera.
- Minimice los puntos de la malla cuando sea posible: Apunte al menor número de puntos que aún capture la física esencial. Esto mejora la velocidad y puede mejorar la robustez numérica.
- Más puntos ≠ siempre mejor: Si aumentar la densidad de la malla conduce a corrientes ruidosas, problemas de convergencia o perfiles inestables, intente reducir el número de puntos y/o refinar solo en las regiones que importan.
- Utilice mallas gruesas para exploración: Al probar ajustes o investigar el comportamiento general del dispositivo, reduzca la densidad de la malla para obtener retroalimentación rápida y luego refine selectivamente para lograr precisión.
- Refine con un propósito: Añada puntos donde los gradientes sean reales (interfaces, regiones de agotamiento, capas finas), no en todas partes. El refinamiento uniforme suele ser la opción menos eficiente.