Tutorial de GaAs (Parte B): 3D → 2D → 1D (Eliminando el defecto)
1. Introducción: elegir entre deriva–difusión 3D, 2D y 1D
Una decisión clave de modelado en simulación de dispositivos semiconductores es elegir la dimensionalidad apropiada: 3D, 2D o 1D. Los modelos de mayor dimensión son más costosos de ejecutar, pero los modelos de menor dimensión pueden pasar por alto física importante si existen efectos laterales. Esta sección se centra en aprender cuándo se requiere realmente una dimensionalidad mayor. En la Parte A, el diodo de GaAs contenía un defecto vertical que forzaba el flujo lateral de corriente, haciendo que el problema fuera intrínsecamente 3D. Aquí eliminamos esa asimetría desactivando el defecto, convirtiendo el mismo dispositivo en una estructura uniforme que puede resolverse en 3D, 2D y 1D usando los mismos parámetros físicos.
Como regla general, los modelos 1D se aplican a pilas lateralmente uniformes (por ejemplo diodos pn ideales o células solares), los modelos 2D capturan una única variación lateral (por ejemplo OFETs, efectos de borde o defectos lineales), y los modelos 3D son necesarios para características localizadas como derivaciones, filamentos, contactos de área finita o defectos puntuales. En este tutorial aprenderá a comparar simulaciones de deriva–difusión 3D, 2D y 1D, evaluar el tiempo de ejecución y el escalado de malla, y decidir cuándo el modelado de mayor dimensionalidad aporta información física real — y cuándo no.
2. Eliminar la asimetría lateral (desactivar los objetos de defecto)
En la Parte A, el defecto vertical forzaba el flujo lateral de corriente e hizo que el dispositivo fuera intrínsecamente tridimensional. Para estudiar cómo la dimensionalidad por sí sola afecta al tiempo de ejecución y a los resultados, ahora eliminamos esta fuente de variación lateral manteniendo intacta la geometría subyacente. En lugar de eliminar el defecto, lo desactivaremos para que el dispositivo pase a ser lateralmente uniforme en las direcciones x y z.
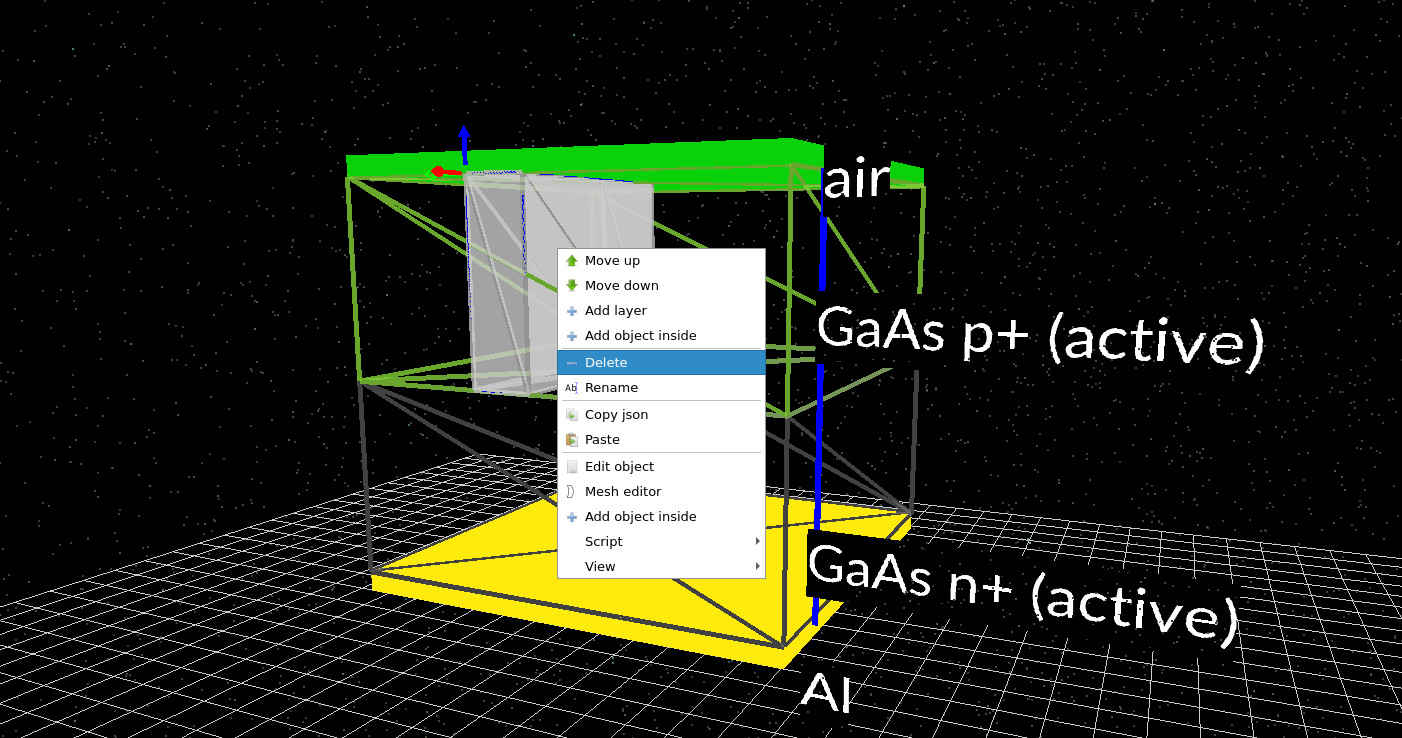
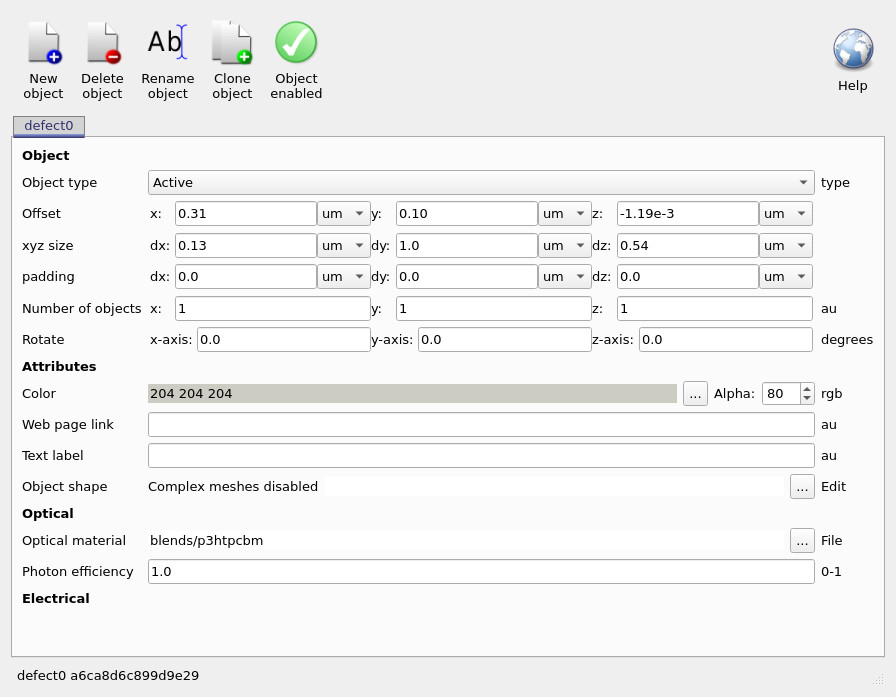
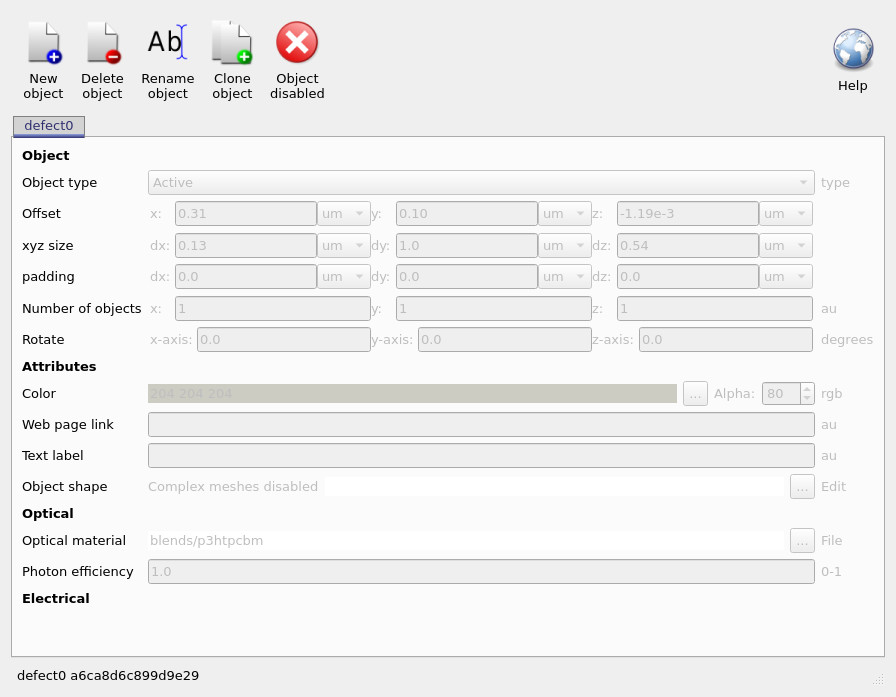
El defecto consta de dos objetos separados. En la vista 3D del dispositivo, haga clic derecho en uno de los bloques de defecto y seleccione Edit object (no Delete), como se muestra en ??. Esto abre el editor de objetos (??), donde puede conmutar el control verde Object enabled. Una vez desactivado, el objeto queda marcado con una cruz roja y sus campos aparecen atenuados (??). Repita este proceso para el segundo bloque de defecto.
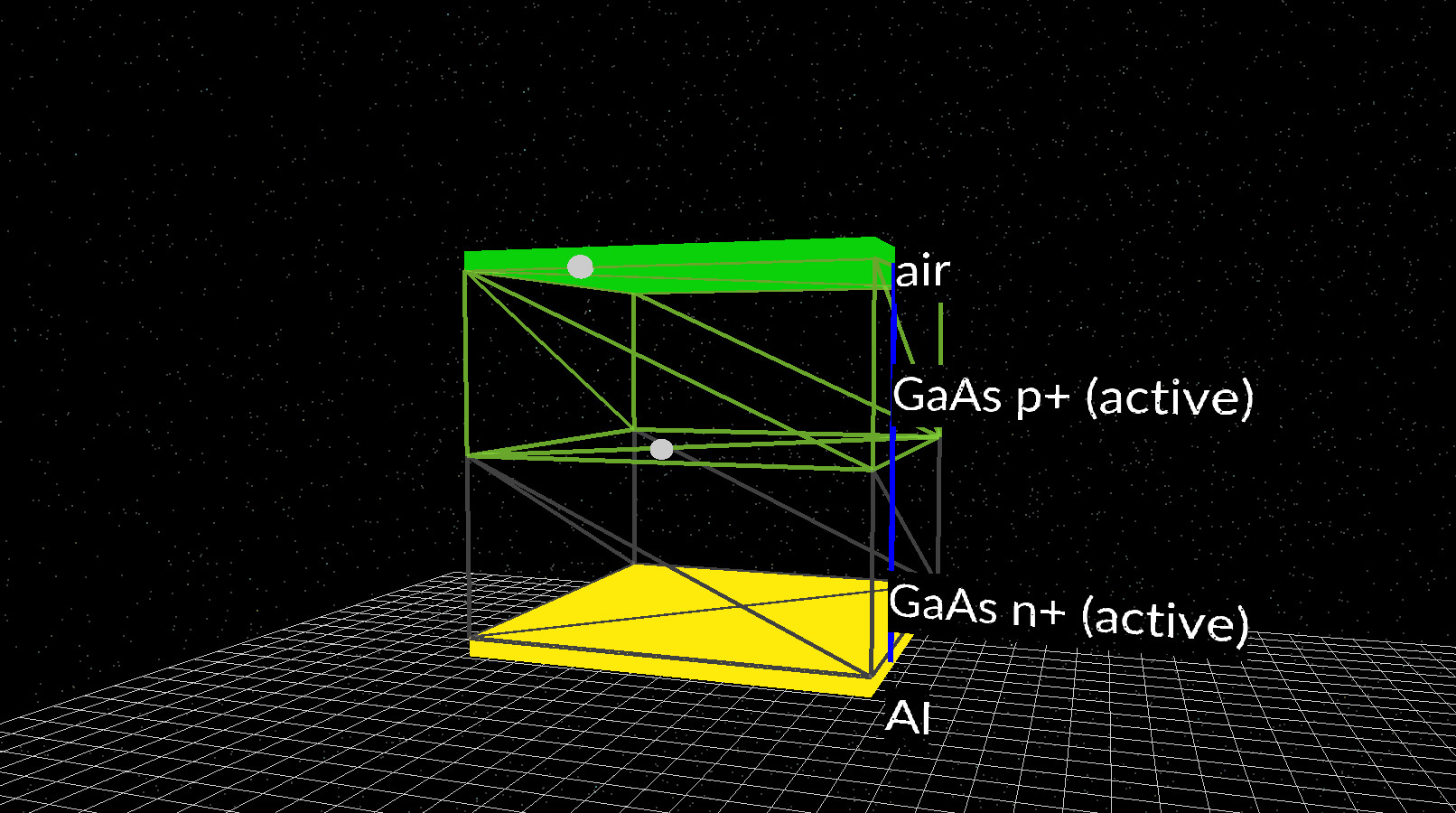
Después de desactivar ambos bloques de defecto, la vista principal de simulación debería parecerse a ??. Los volúmenes del defecto se sustituyen por pequeñas esferas marcadoras, lo que indica que los objetos siguen existiendo en el proyecto pero ya no participan en la simulación. Esto restablece la uniformidad lateral preservando la geometría original, lo que nos permite cambiar la dimensionalidad en el siguiente paso sin introducir nuevas características físicas.
3. Comparación de simulaciones 3D, 2D y 1D: dimensionalidad, tiempo de ejecución y resultados
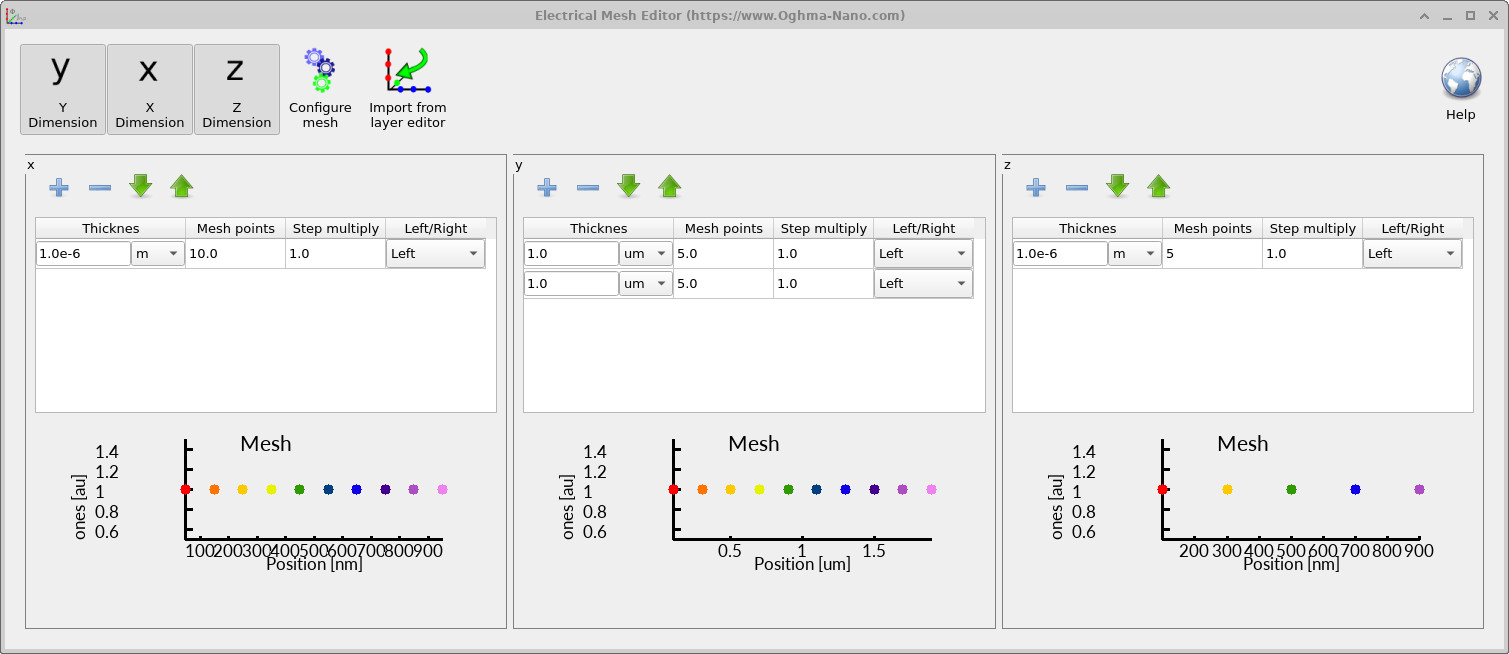
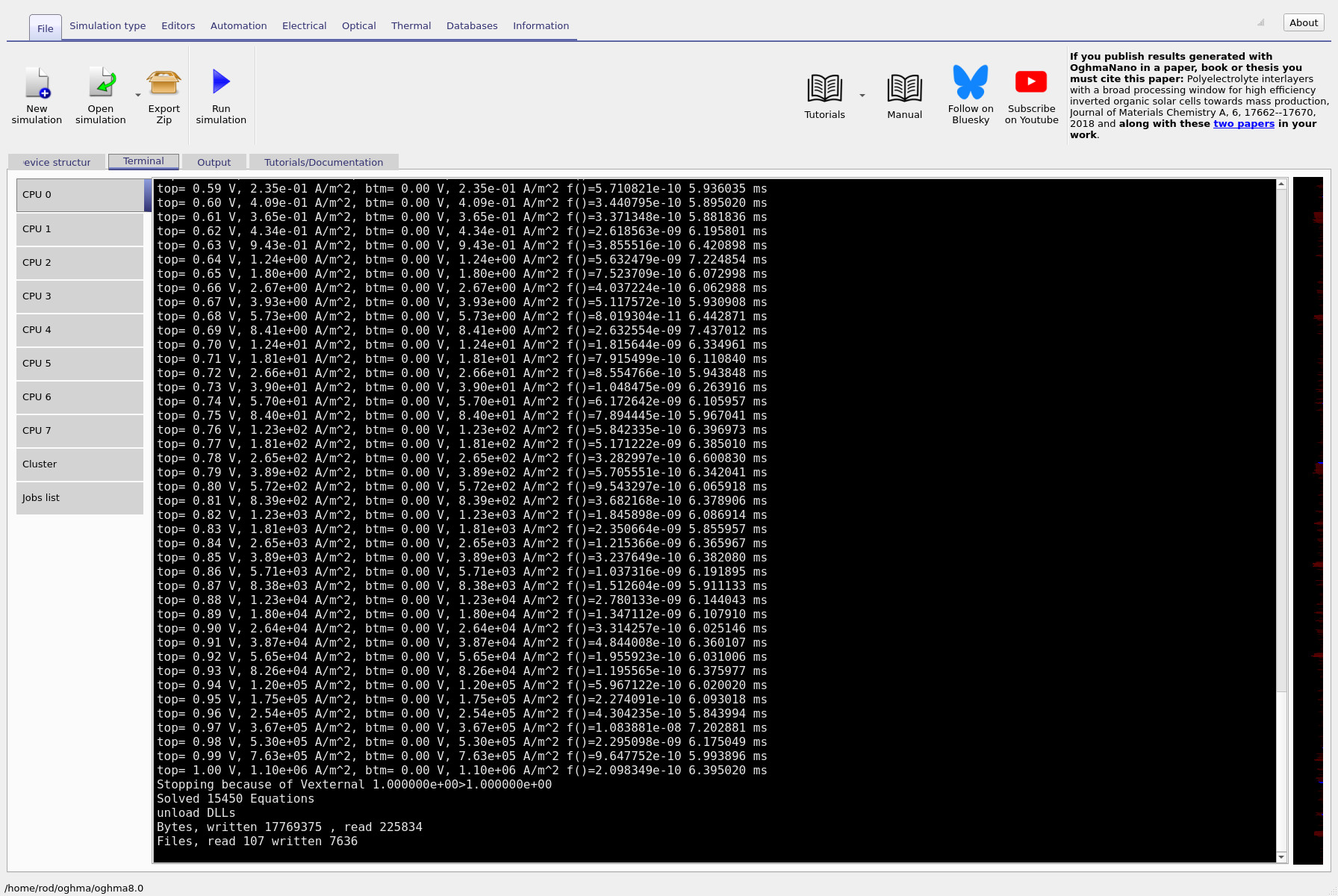
Con el defecto desactivado, el dispositivo es ahora lateralmente uniforme en las direcciones x y z. Esto nos permite estudiar el efecto de la dimensionalidad por sí sola, sin introducir ninguna característica física nueva. En esta sección ejecutará el mismo diodo de GaAs como un problema de deriva–difusión 3D, 2D y 1D, comparará cuánto tarda cada simulación y verificará que los resultados eléctricos permanecen inalterados. Comience abriendo la cinta Electrical y haciendo clic en Electrical mesh (véase ??). En primer lugar, asegúrese de que x, y y z están todos activados, para que la simulación sea totalmente tridimensional (??). Con la malla en este estado, ejecute la simulación y observe la salida del terminal mientras avanza.
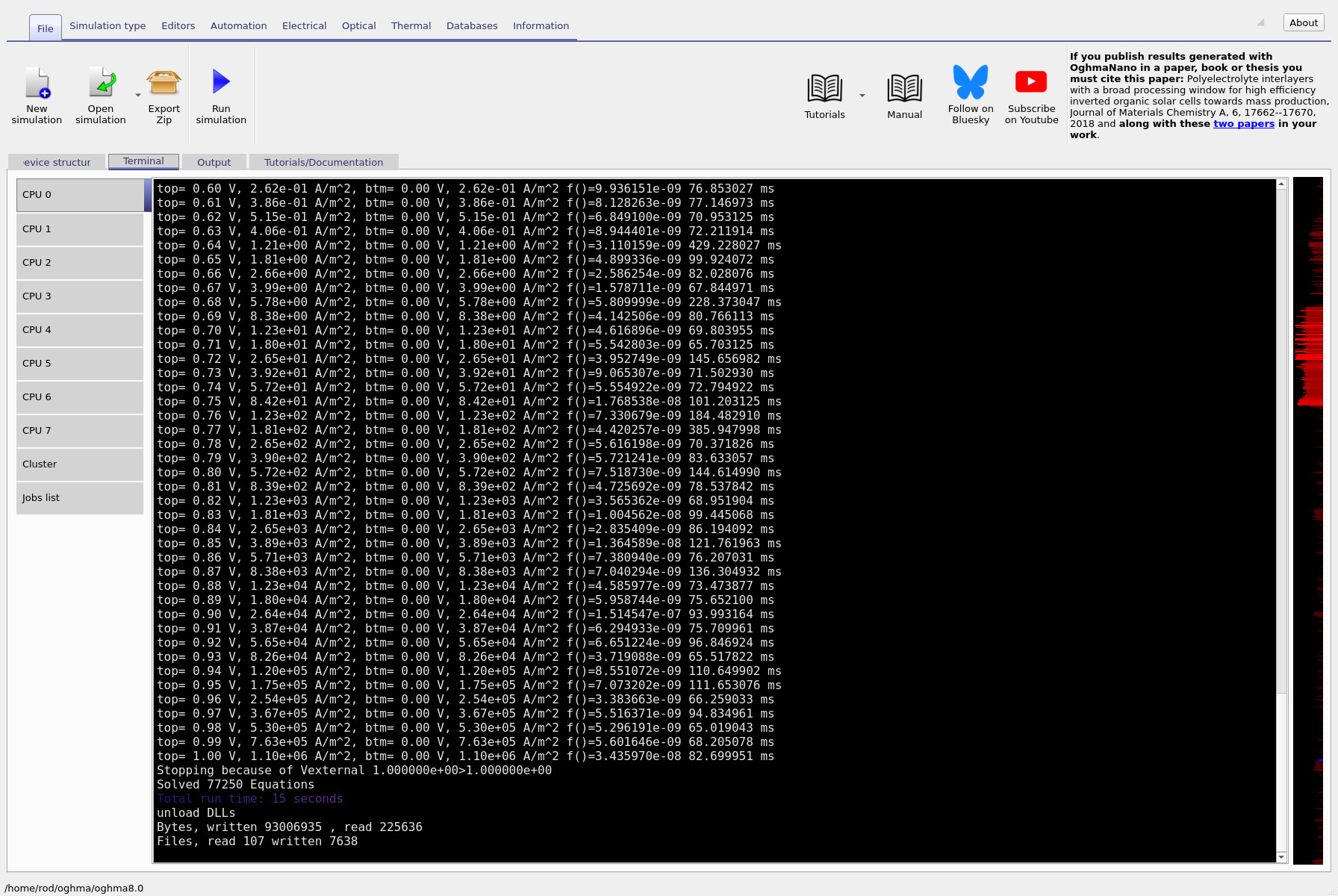
Durante la ejecución, céntrese en la información de tiempos impresa en el terminal. La columna de la derecha indica cuántos milisegundos tarda cada paso de simulación (??). En un portátil típico, el caso 3D debería tardar del orden de decenas a cientos de milisegundos por paso, lo que corresponde a un tiempo total de ejecución de aproximadamente 30 segundos. Cuando finalice la simulación, anote el valor final de corriente indicado al final de la ejecución (por ejemplo, la línea correspondiente a top = 1.00 V).
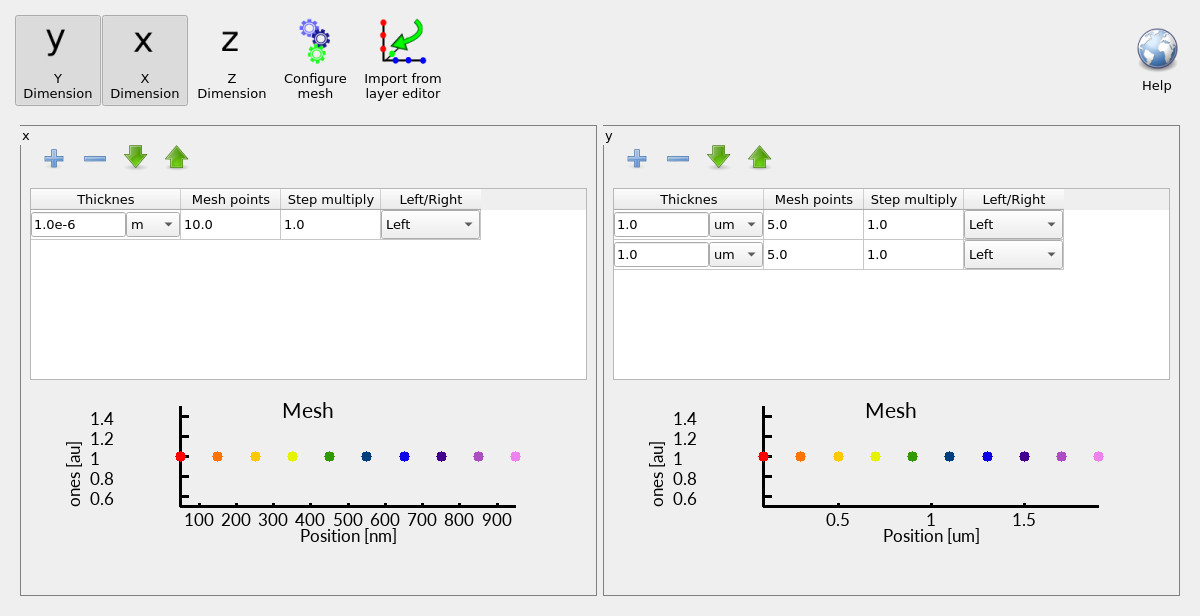
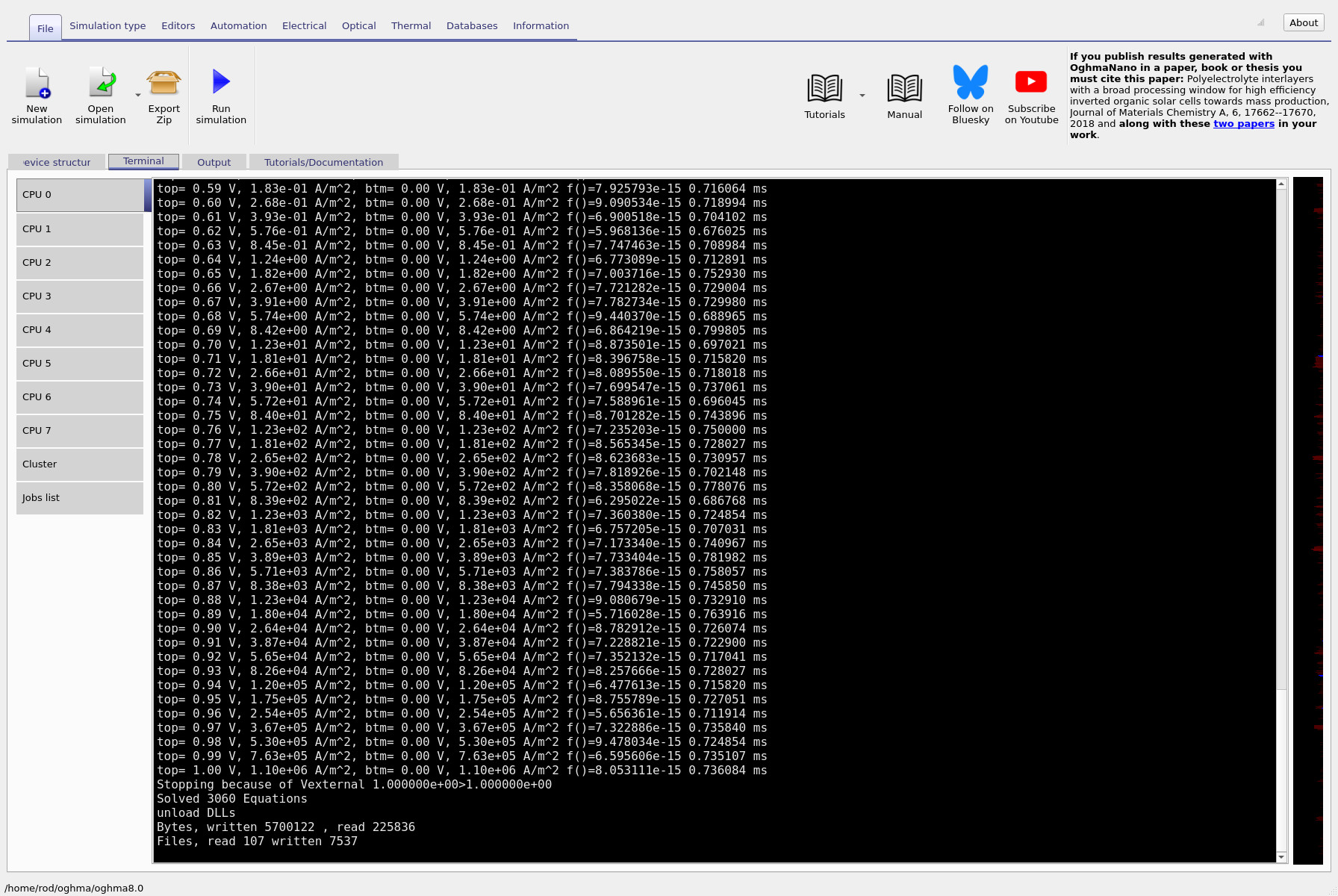
A continuación, vuelva al editor Electrical mesh y desactive la dirección z. La malla debería representar ahora una simulación 2D (y–x) (??). Ejecute la simulación de nuevo y compare la salida del terminal (??). Debería observar una reducción drástica del tiempo de ejecución, con tiempos por paso que caen a solo unos pocos milisegundos. Es importante destacar que el valor final de corriente indicado al final de la ejecución debería ser numéricamente idéntico al caso 3D.
Finalmente, desactive también la dirección x, dejando solo la dirección de transporte y. Esto reduce el problema a una simulación de deriva–difusión puramente 1D (??). Ejecute el solucionador una última vez e inspeccione la salida del terminal (??). En este caso el tiempo por paso es efectivamente cero, y sin embargo la corriente final a top = 1.00 V es la misma que en las ejecuciones 2D y 3D.

Esta comparación ilustra un principio central del modelado de dispositivos. A medida que se reduce la dimensionalidad, la simulación se vuelve drásticamente más rápida porque el número de incógnitas disminuye rápidamente (a menudo escalando aproximadamente con el cubo de la densidad de malla). Sin embargo, dado que el dispositivo es ahora lateralmente uniforme, reducir la dimensionalidad no cambia el resultado físico. Está resolviendo las mismas ecuaciones para la misma estructura, solo que expresadas en una representación de coordenadas más eficiente. La idea clave es que una dimensionalidad mayor no produce automáticamente una física diferente o mejor. Solo aporta valor cuando el propio dispositivo contiene variación lateral genuina. Una vez eliminada esa variación, las simulaciones 3D, 2D y 1D colapsan a la misma solución eléctrica — diferenciándose únicamente en el coste computacional.
Paso 5: Observe que los resultados numéricos son idénticos
Ahora observe atentamente las salidas. Elija una única línea de voltaje (por ejemplo la entrada en top = 1.00 V) y compare las corrientes calculadas entre las ejecuciones 3D, 2D y 1D. Debería comprobar que los valores son los mismos (con precisión numérica). Ésta es la lección clave: una vez que eliminamos la asimetría, el dispositivo es efectivamente 1D, por lo que 2D y 3D no le aportan nueva física — solo le cuestan tiempo de ejecución.
Eso es todo para la Parte B. En la Parte C examinaremos problemas de estabilidad numérica que pueden surgir en simulaciones 2D y 3D, y empezaremos a convertir este diodo en un problema similar a una célula solar introduciendo luz y observando cómo la iluminación cambia la respuesta del dispositivo.
👉 Siguiente paso: Continúe con Parte C.