GaAs チュートリアル(パート B):3D → 2D → 1D(欠陥の除去)
1. はじめに:3D、2D、および 1D drift–diffusion の選択
半導体デバイスシミュレーションにおける重要なモデリング上の判断の 1 つは、 適切な 次元性 を選択することです: 3D、2D、または 1D。 高次元モデルは実行コストが高くなりますが、横方向効果が存在する場合には、 低次元モデルでは重要な物理を見落とす可能性があります。 この節では、実際にいつ高次元性が必要となるのか を学ぶことに焦点を当てます。 パート A では、GaAs ダイオードには垂直欠陥が含まれており、 横方向の電流流れが強制されるため、問題は本質的に 3D でした。 ここでは、その欠陥を無効化して非対称性を除去し、 同じデバイスを 一様構造 に変えることで、 同じ物理パラメータを用いて 3D、2D、および 1D で解けるようにします。
経験則として、1D モデルは横方向に一様な積層構造 (例:理想 pn ダイオードや太陽電池)に適用され、 2D モデルは 1 つの横方向変化 (例:OFET、エッジ効果、あるいは線状欠陥)を捉え、 3D モデルは局在化した特徴 (シャント、フィラメント、有限面積接触、あるいは点欠陥など)に必要です。 このチュートリアルでは、3D、2D、および 1D drift–diffusion シミュレーションを比較する方法、 実行時間とメッシュスケーリング を評価する方法、 そして高次元モデリングが本当に物理的洞察を追加する場合と、そうでない場合を判断する方法を学びます。
2. 横方向非対称性を除去する(欠陥オブジェクトを無効化する)
パート A では、垂直欠陥が横方向の電流流れを強制し、 デバイスを本質的に 三次元 の問題にしていました。 次元性そのものが実行時間と結果に与える影響を調べるために、 ここでは基礎となるジオメトリをそのまま保ったまま、 この横方向変化の原因を除去します。 欠陥を削除するのではなく、無効化 することで、 デバイスを x および z 方向に 横方向一様 にします。
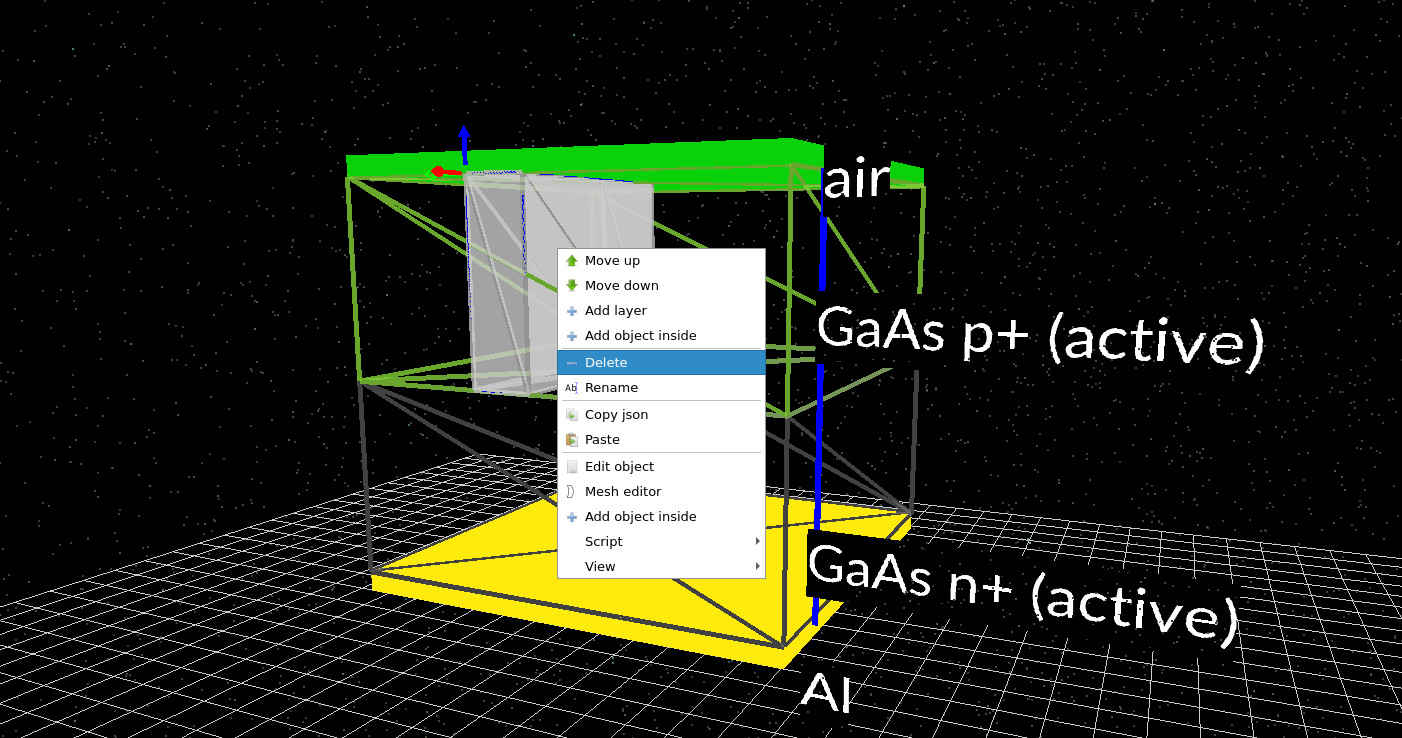
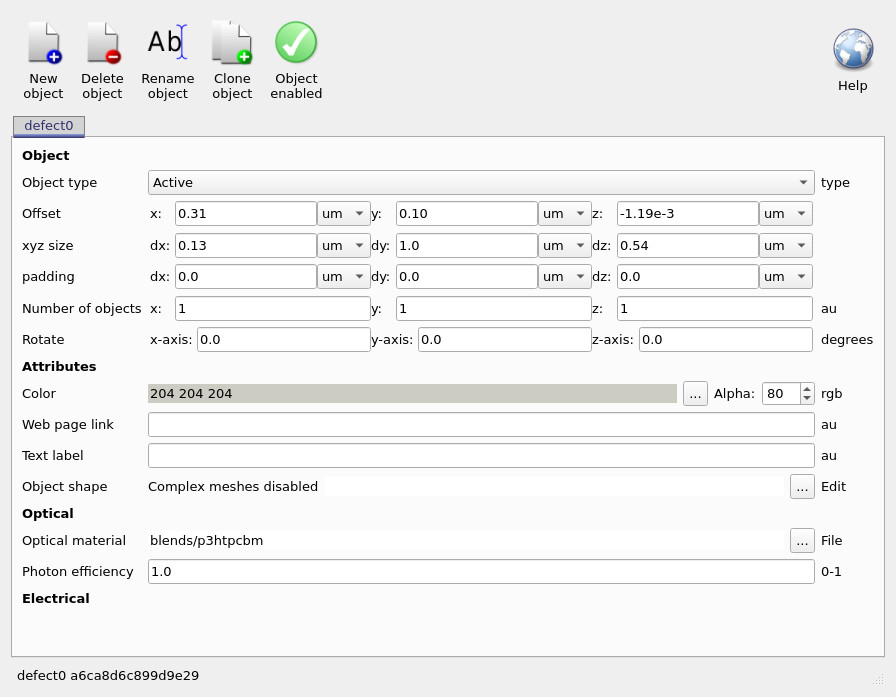
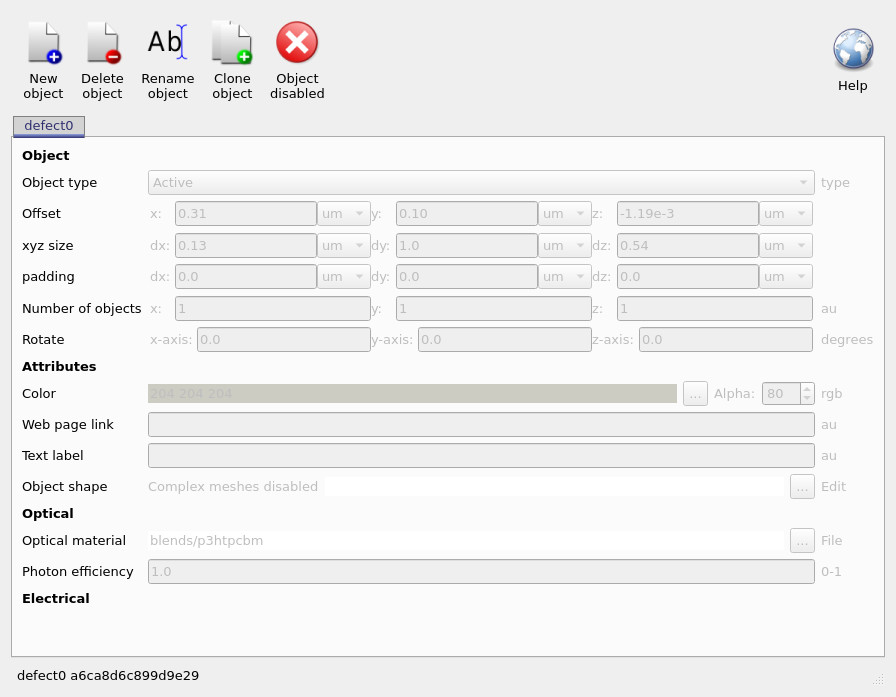
この欠陥は 2 つの別個のオブジェクト から構成されています。 3D デバイスビューで、欠陥ブロックの 1 つを 右クリック し、 Edit object を選択します(Delete ではありません)。 これは ?? に示されています。 これによりオブジェクトエディタが開き (??)、 緑色の Object enabled コントロールを切り替えることができます。 無効化されると、オブジェクトには赤いバツ印が付き、そのフィールドはグレーアウトされます (??)。 この操作を 2 つ目 の欠陥ブロックにも繰り返してください。
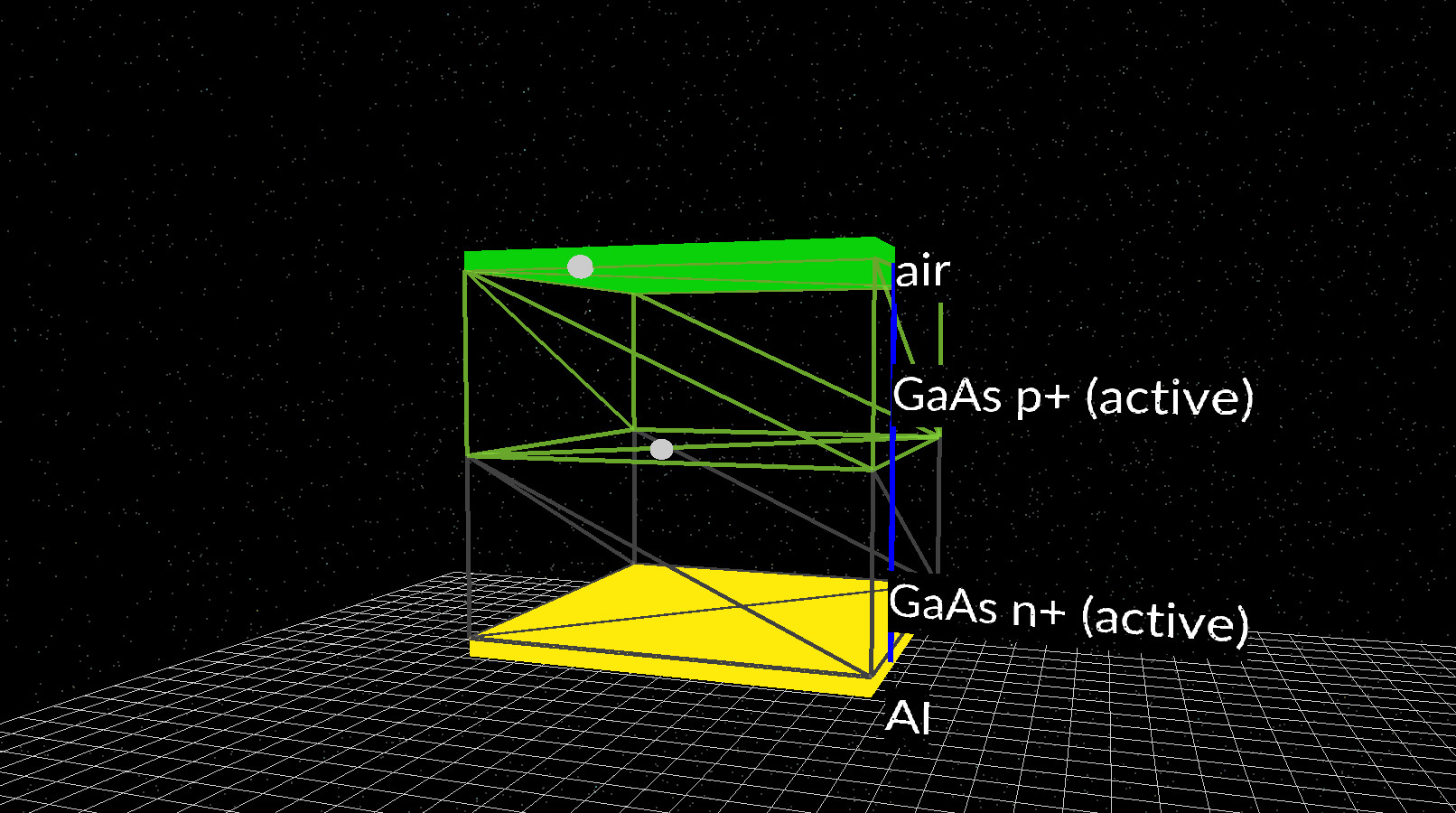
両方の欠陥ブロックを無効化した後、メインシミュレーションビューは ?? のようになるはずです。 欠陥体積は小さなマーカ球に置き換えられます。これは、オブジェクトが依然として プロジェクト内に存在しているものの、シミュレーションにはもう関与しないことを示しています。 これにより、元のジオメトリを保ったまま横方向一様性が回復し、 次のステップで新しい物理的特徴を導入せずに次元性を変更できるようになります。
3. 3D、2D、および 1D シミュレーションの比較:次元性、実行時間、および結果
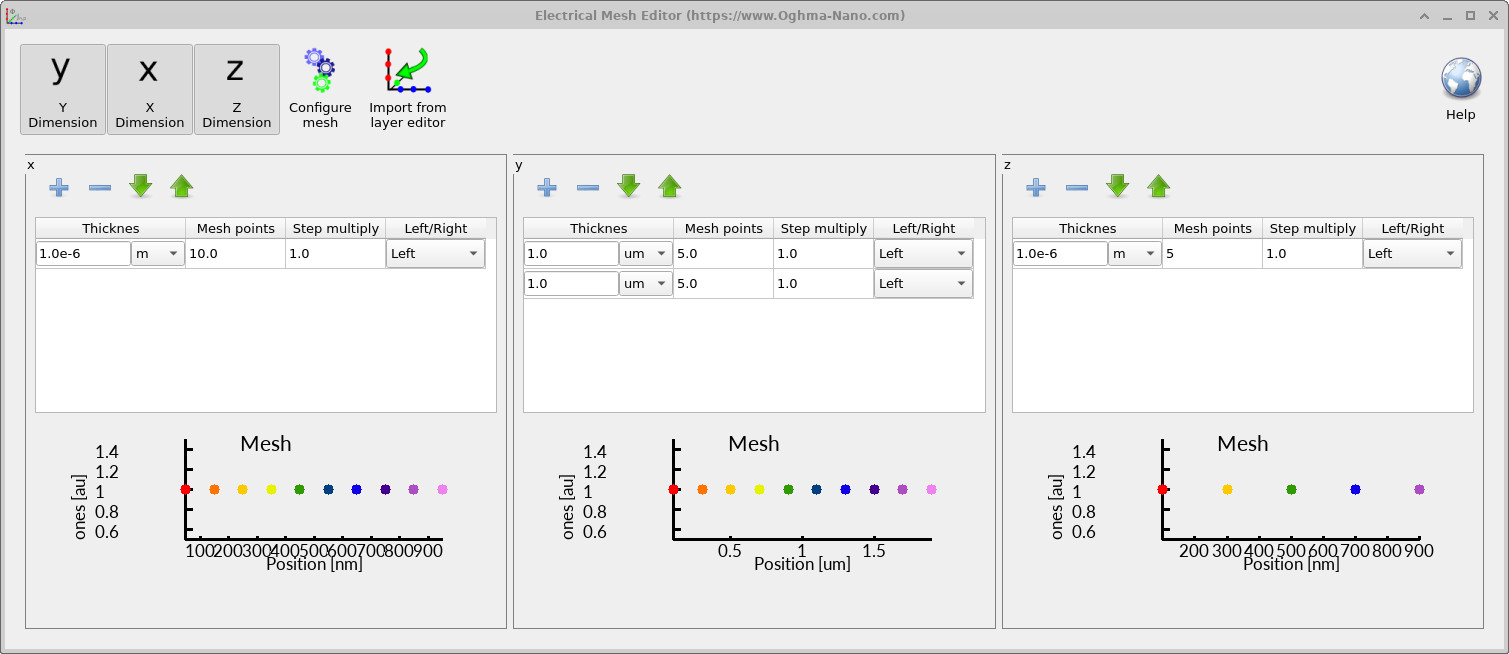
欠陥が無効化されたことで、デバイスは現在 x および z 方向で横方向一様です。 これにより、新しい物理的特徴を導入することなく、 次元性そのものの効果 を調べることができます。 この節では、同じ GaAs ダイオードを 3D、2D、および 1D の drift–diffusion 問題として実行し、 各シミュレーションにかかる時間を比較し、 電気的結果が変化しない ことを確認します。 まず Electrical リボンを開き、Electrical mesh をクリックしてください (?? を参照)。 まず x、y、および z がすべて有効になっていることを確認し、 シミュレーションが完全な 三次元 になるようにします (??)。 この状態のメッシュでシミュレーションを実行し、 進行中の端末出力を観察してください。
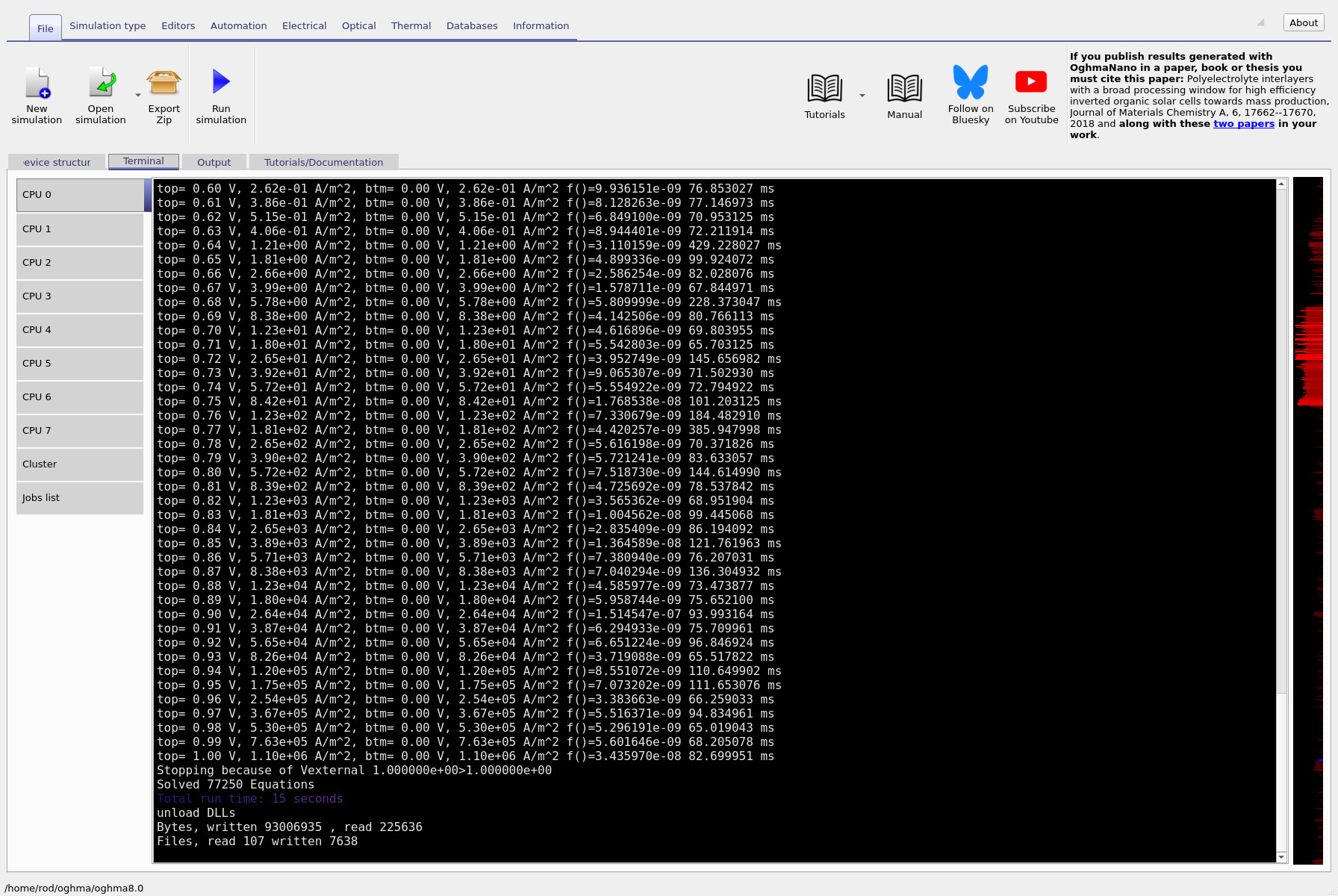
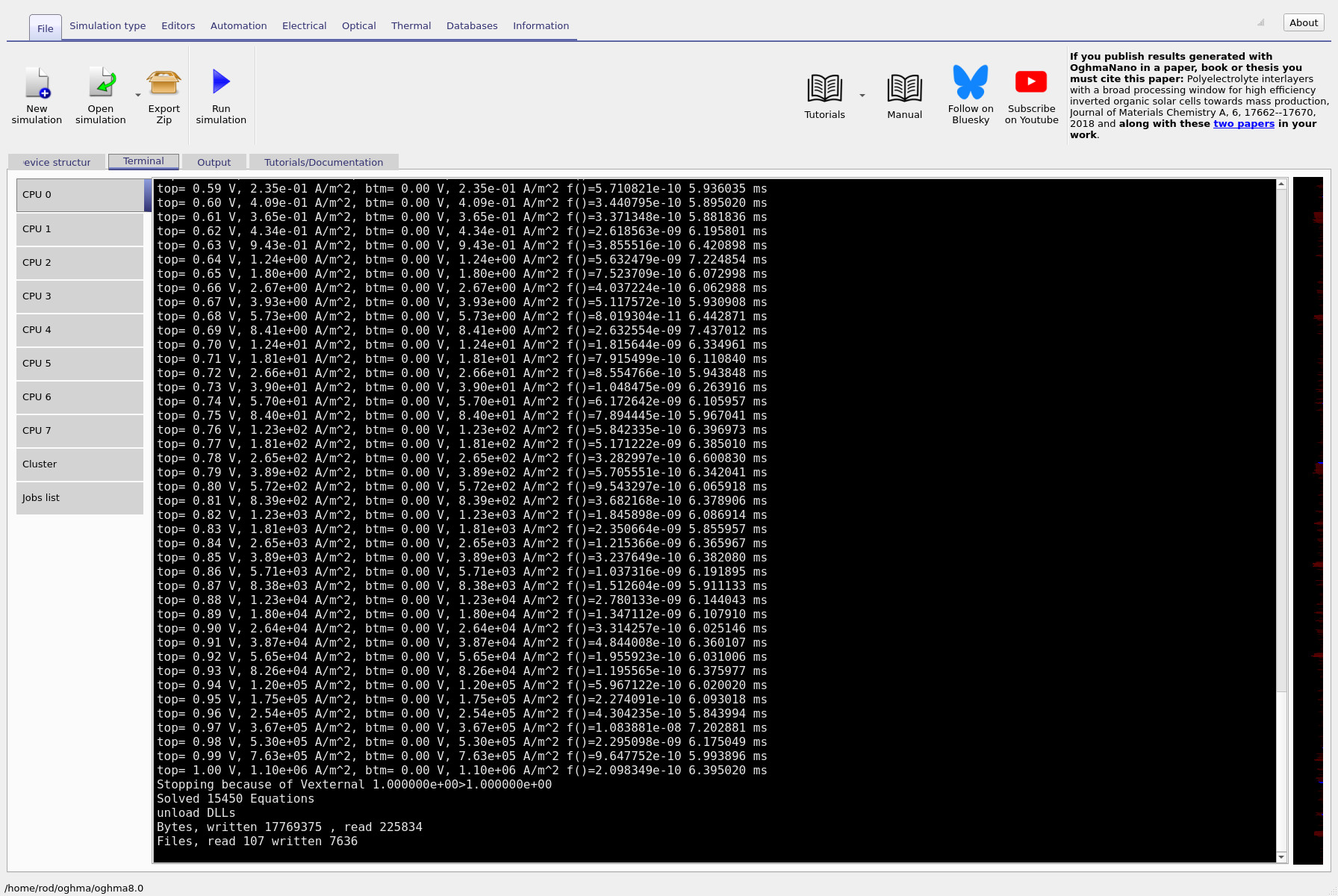
実行中は、端末に表示される時間情報に注目してください。 右側の列には、各シミュレーションステップに何ミリ秒かかるか が表示されます (??)。 一般的なノート PC では、3D の場合は 1 ステップあたり 数十〜数百ミリ秒程度 となり、 合計実行時間はおよそ 30 秒 になります。 シミュレーションが終了したら、実行の最後に報告される最終電流値 (例えば top = 1.00 V に対応する行)を記録してください。
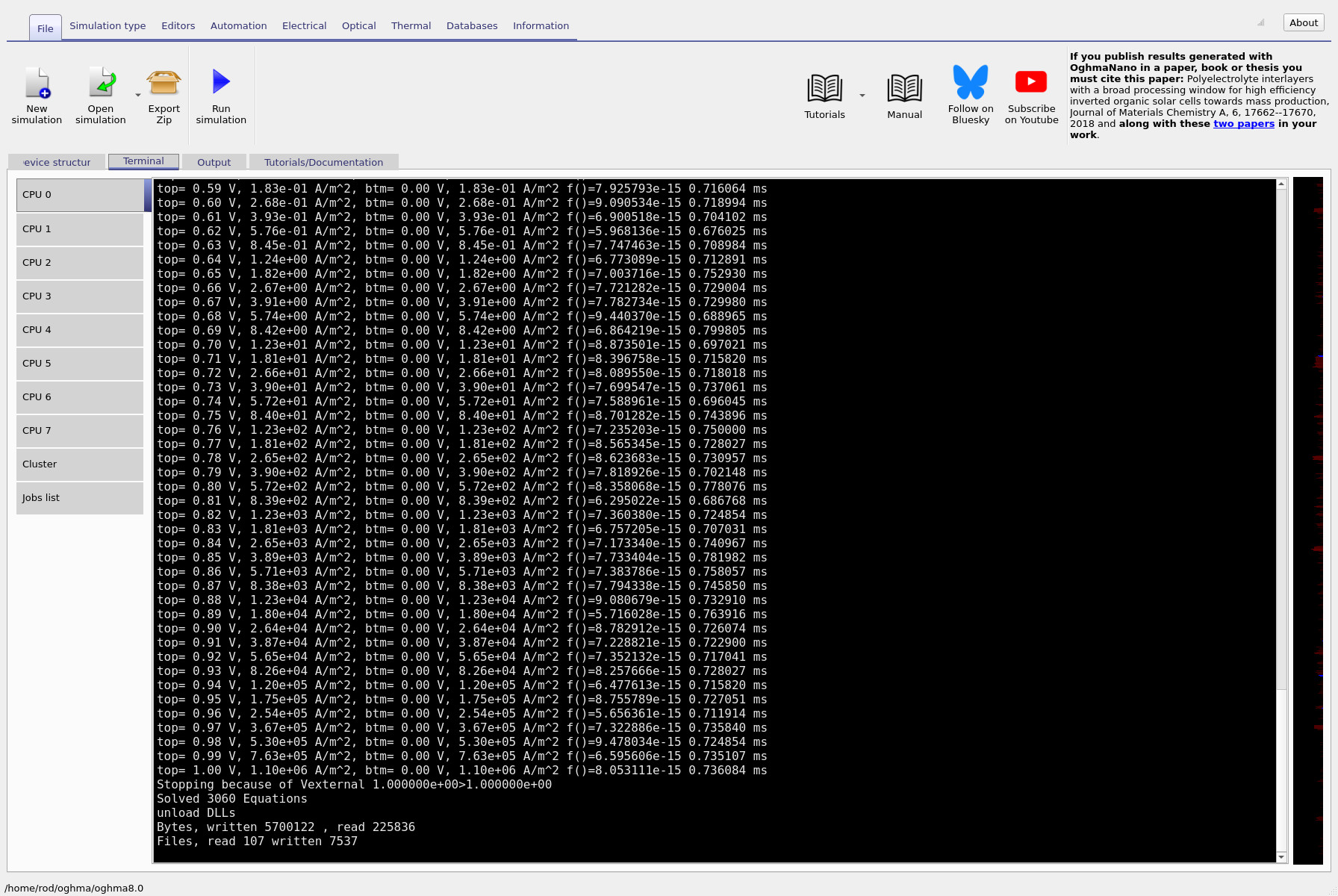
次に Electrical mesh エディタに戻り、 z 方向を無効化します。 メッシュはこれで 2D (y–x) シミュレーションを表すようになります (??)。 もう一度シミュレーションを実行し、端末出力を比較してください (??)。 実行時間は劇的に短くなり、 1 ステップあたりの時間は数ミリ秒程度まで低下するはずです。 重要なのは、実行終了時に報告される最終電流値が 3D の場合と 数値的に同一 であることです。
最後に、x 方向も無効化し、 輸送方向である y のみを残します。 これにより問題は純粋な 1D drift–diffusion シミュレーションに縮約されます (??)。 ソルバーを最後にもう一度実行し、端末出力を確認してください (??)。 この場合、1 ステップあたりの時間は実質的にゼロになりますが、 top = 1.00 V における最終電流は 2D および 3D 実行と同じです。

この比較は、デバイスモデリングにおける中心的な原理を示しています。 次元性が低くなるにつれて、未知数の数が急速に減少するため、 シミュレーションは劇的に高速になります (しばしばメッシュ密度の 3 乗程度に比例してスケールします)。 しかし、デバイスが現在横方向に一様であるため、 次元性を下げても物理的結果は 変化しません。 これは同じ構造に対して同じ方程式を解いているのであり、 ただより効率的な座標表現で表しているだけです。 重要な結論は、高次元性が自動的に異なる、あるいはより良い物理を与えるわけではない ということです。 それが価値を持つのは、デバイス自体が実際の横方向変化を含む場合だけです。 その変化を除去すると、3D、2D、および 1D シミュレーションは同じ電気的解へと収束し、 違いは計算コストだけになります。
ステップ 5:数値結果が同一であることに注目する
次に、出力を注意深く見てください。1 つの電圧行 (例えば top = 1.00 V のエントリ)を選び、 3D、2D、および 1D 実行で計算された電流を比較します。 これらの値は 同じ(数値精度の範囲で)であるはずです。 これが重要な教訓です: 非対称性を除去すると、デバイスは事実上 1D になるため、 2D や 3D は新しい物理をもたらしません — 追加されるのは実行時間だけです。
これでパート B は終了です。パート C では、2D および 3D シミュレーションで生じ得る数値安定性の問題を見ていき、 光を導入して照射がデバイス応答をどのように変えるかを観察することで、 このダイオードを太陽電池のような問題へ変えていきます。
👉 次のステップ: パート C に進んでください。