Tutorial de GaAs (Parte B): 3D → 2D → 1D (Removendo o defeito)
1. Introdução: escolhendo entre drift–diffusion 3D, 2D e 1D
Uma decisão-chave de modelagem em simulação de dispositivos semicondutores é escolher a dimensionalidade apropriada: 3D, 2D, ou 1D. Modelos de dimensionalidade mais alta são mais caros computacionalmente, mas modelos de dimensionalidade mais baixa podem deixar de capturar física importante se efeitos laterais estiverem presentes. Esta seção foca em aprender quando dimensionalidade mais alta é realmente necessária. Na Parte A, o diodo de GaAs continha um defeito vertical que forçava fluxo lateral de corrente, tornando o problema intrinsecamente 3D. Aqui, removemos essa assimetria desativando o defeito, transformando o mesmo dispositivo em uma estrutura uniforme que pode ser resolvida em 3D, 2D e 1D usando os mesmos parâmetros físicos.
Como regra prática, modelos 1D se aplicam a pilhas lateralmente uniformes (por exemplo, diodos pn ideais ou células solares), modelos 2D capturam uma única variação lateral (por exemplo, OFETs, efeitos de borda ou defeitos lineares), e modelos 3D são necessários para características localizadas como shunts, filamentos, contatos de área finita ou defeitos pontuais. Neste tutorial você aprenderá como comparar simulações de drift–diffusion 3D, 2D e 1D, avaliar tempo de execução e escalonamento de malha, e decidir quando a modelagem em dimensionalidade mais alta adiciona uma visão física real—e quando não adiciona.
2. Remover a assimetria lateral (desativar os objetos de defeito)
Na Parte A, o defeito vertical forçava fluxo lateral de corrente e tornava o dispositivo intrinsecamente tridimensional. Para estudar como apenas a dimensionalidade afeta o tempo de execução e os resultados, agora removemos essa fonte de variação lateral mantendo a geometria subjacente intacta. Em vez de excluir o defeito, vamos desativá-lo para que o dispositivo se torne lateralmente uniforme nas direções x e z.
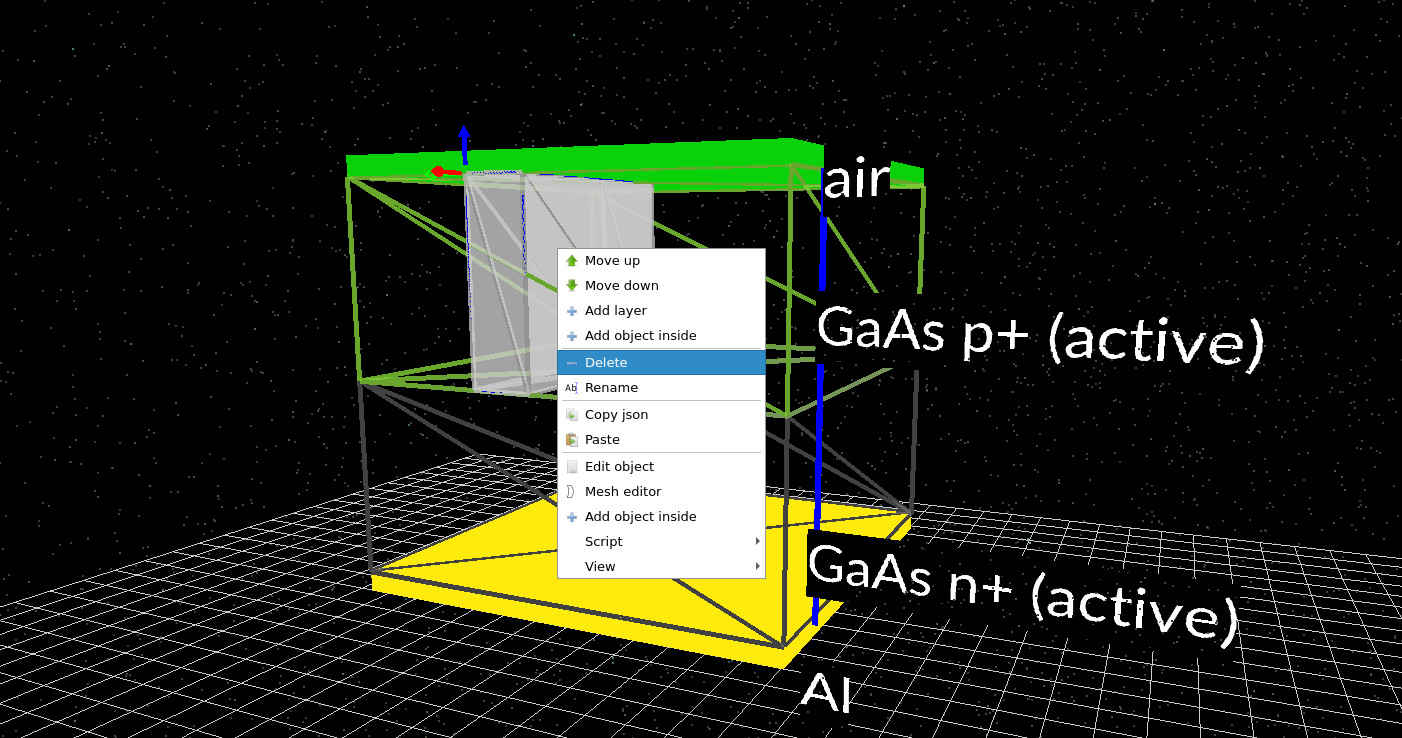
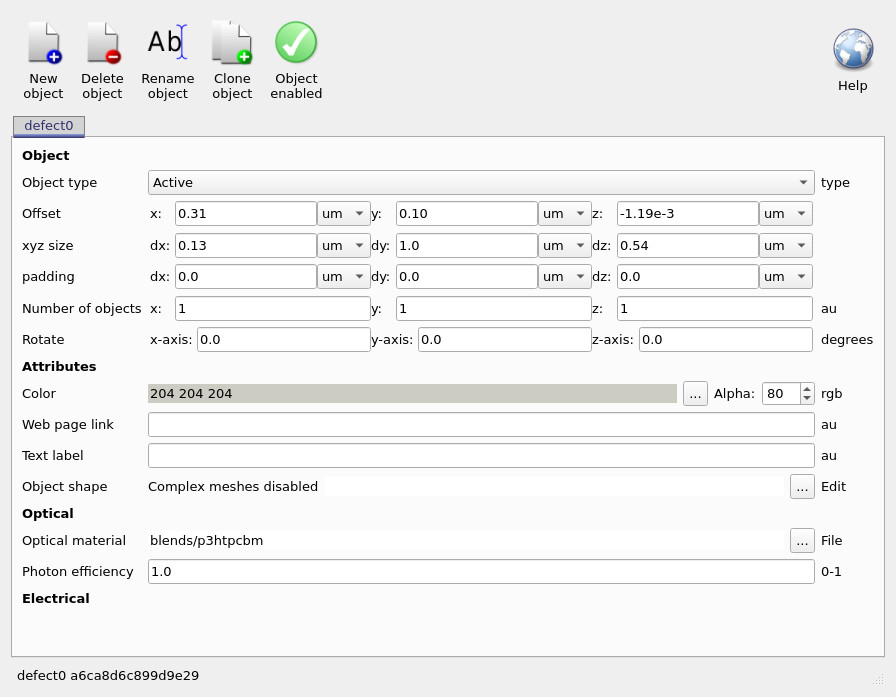
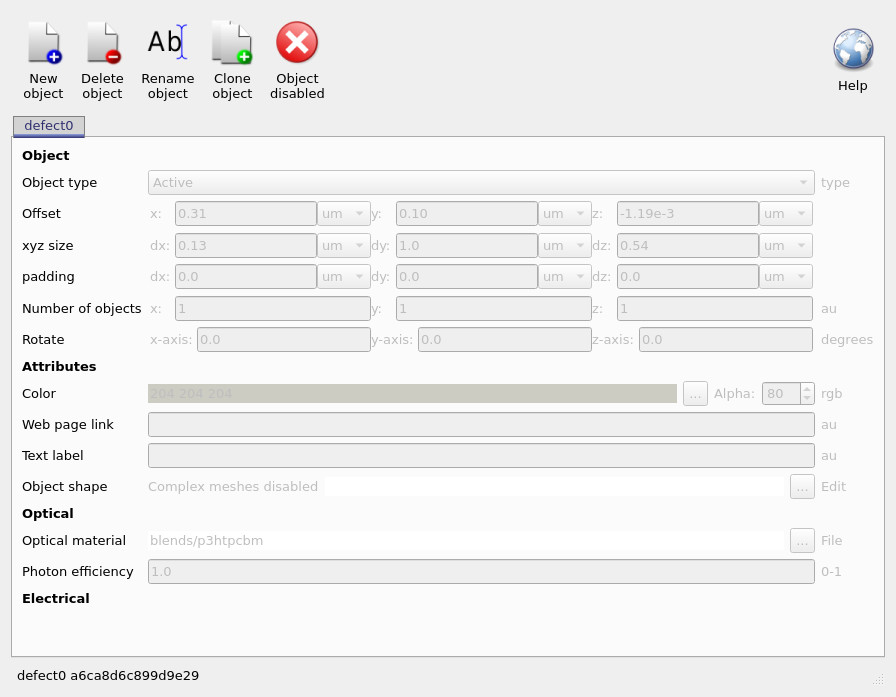
O defeito consiste em dois objetos separados. Na visualização 3D do dispositivo, clique com o botão direito em um dos blocos de defeito e selecione Editar objeto (não Excluir), como mostrado em ??. Isso abre o editor de objeto (??), onde você pode alternar o controle verde Objeto ativado. Uma vez desativado, o objeto é marcado com uma cruz vermelha e seus campos ficam esmaecidos (??). Repita esse processo para o segundo bloco de defeito.
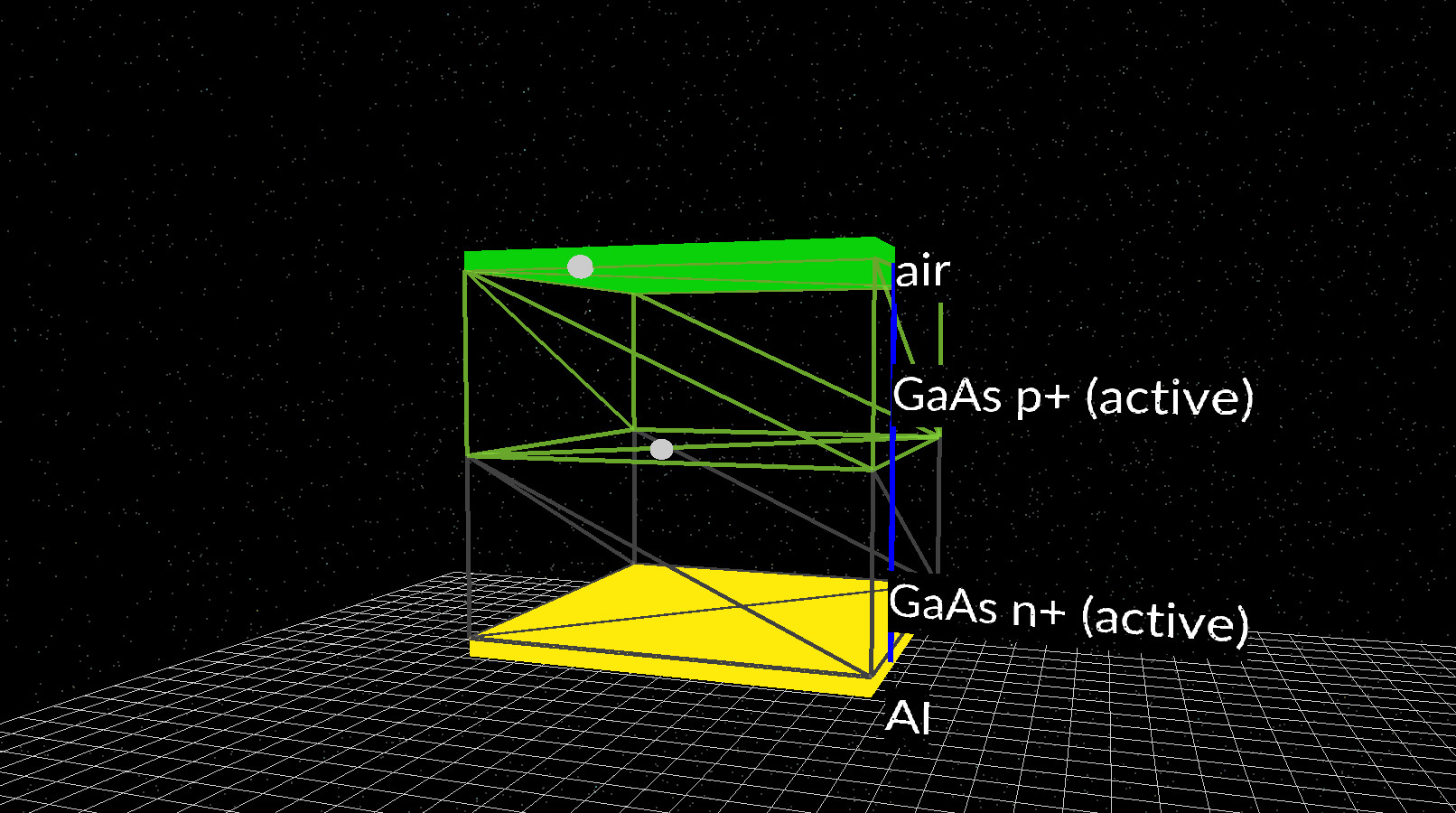
Depois de desativar ambos os blocos de defeito, a visualização principal da simulação deve se parecer com ??. Os volumes de defeito são substituídos por pequenas esferas marcadoras, indicando que os objetos ainda existem no projeto mas não participam mais da simulação. Isso restaura a uniformidade lateral preservando a geometria original, permitindo que mudemos a dimensionalidade na próxima etapa sem introduzir novas características físicas.
3. Comparando simulações 3D, 2D e 1D: dimensionalidade, tempo de execução e resultados
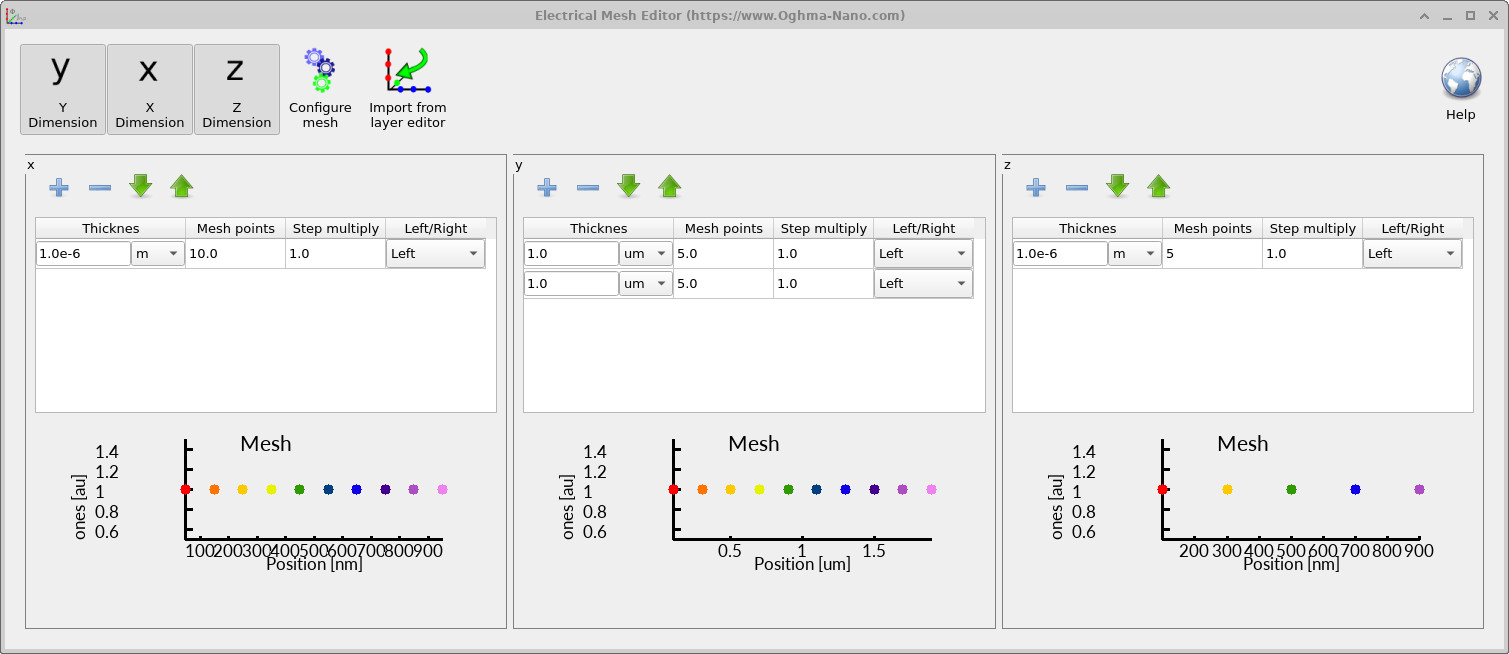
Com o defeito desativado, o dispositivo agora é lateralmente uniforme nas direções x e z. Isso nos permite estudar o efeito da dimensionalidade isoladamente, sem introduzir novas características físicas. Nesta seção você executará o mesmo diodo de GaAs como um problema de drift–diffusion 3D, 2D e 1D, comparará quanto tempo cada simulação leva, e verificará que os resultados elétricos permanecem inalterados. Comece abrindo a faixa Elétrica e clicando em Malha elétrica (veja ??). Primeiro, certifique-se de que x, y e z estejam todos ativados, para que a simulação seja totalmente tridimensional (??). Com a malha nesse estado, execute a simulação e observe a saída do terminal enquanto ela progride.
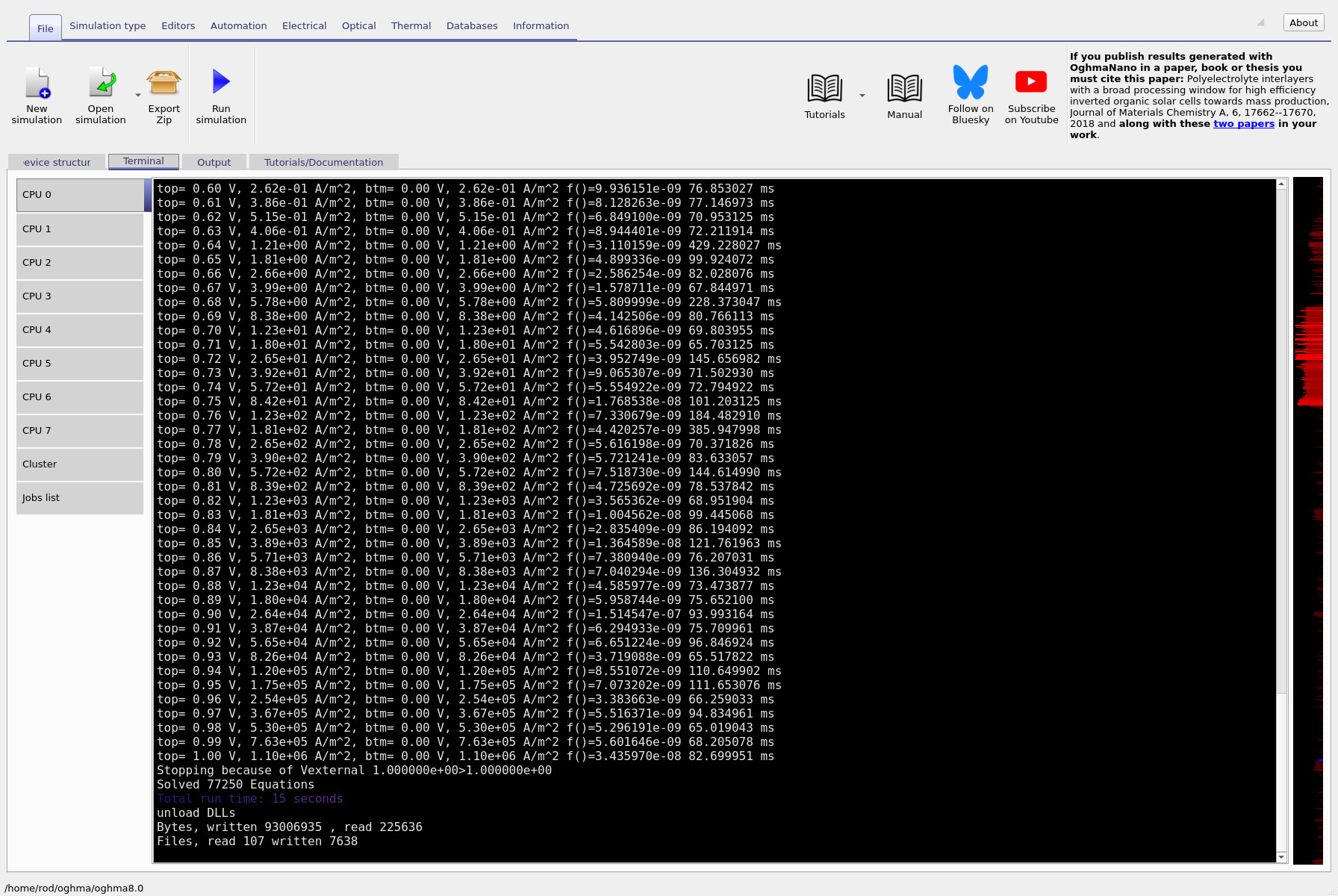
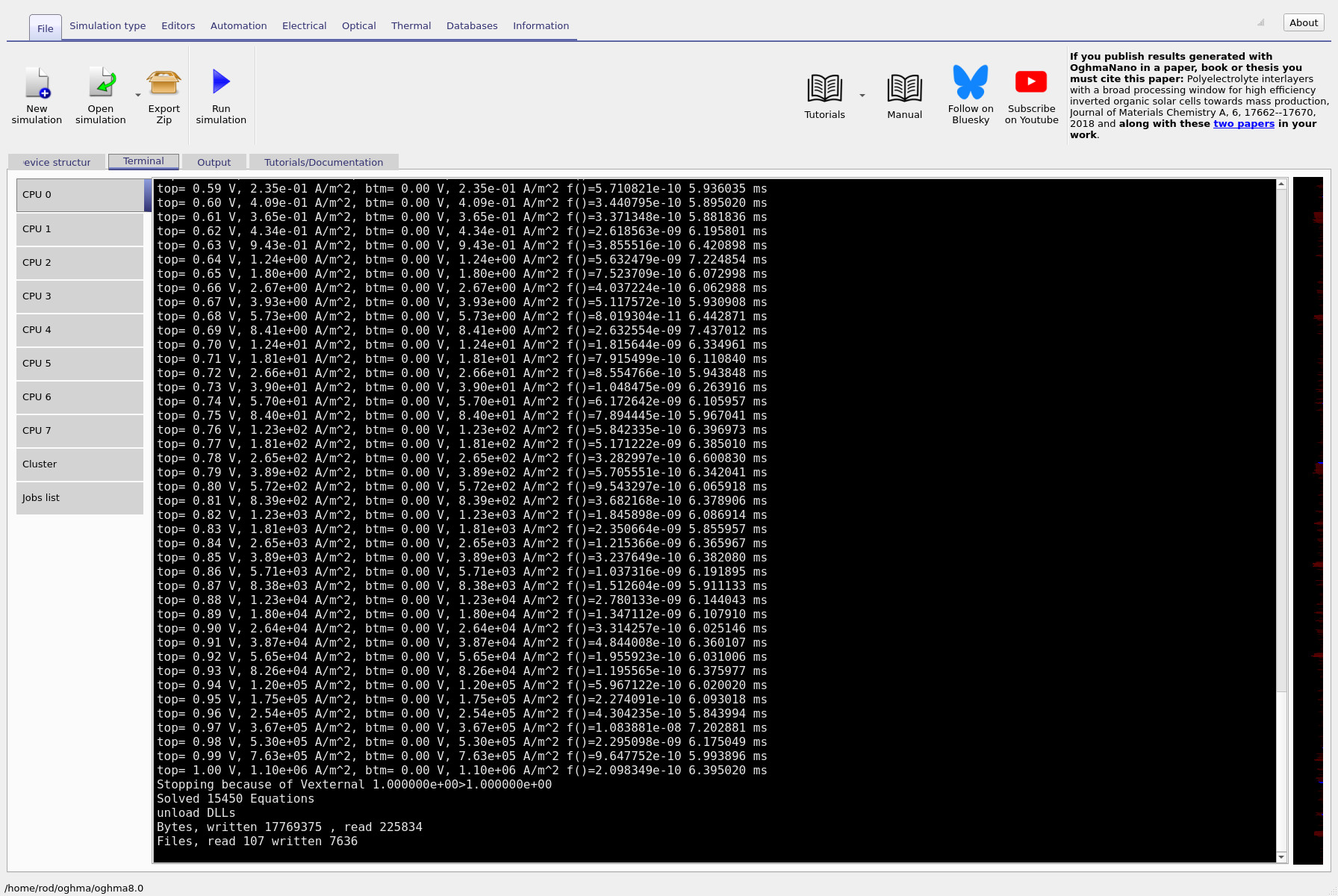
Durante a execução, concentre-se nas informações de tempo impressas no terminal. A coluna à direita informa quantos milissegundos cada passo de simulação leva (??). Em um laptop típico, o caso 3D deve levar da ordem de dezenas a centenas de milissegundos por passo, correspondendo a um tempo total de execução de aproximadamente 30 segundos. Quando a simulação terminar, anote o valor final de corrente informado ao final da execução (por exemplo, a linha correspondente a top = 1.00 V).
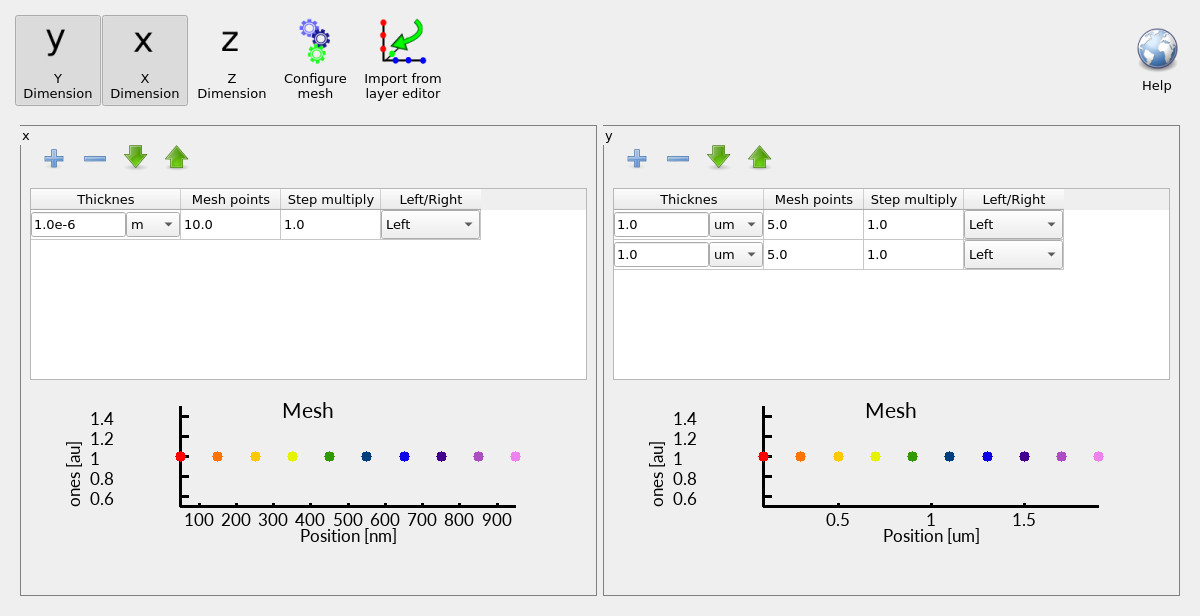
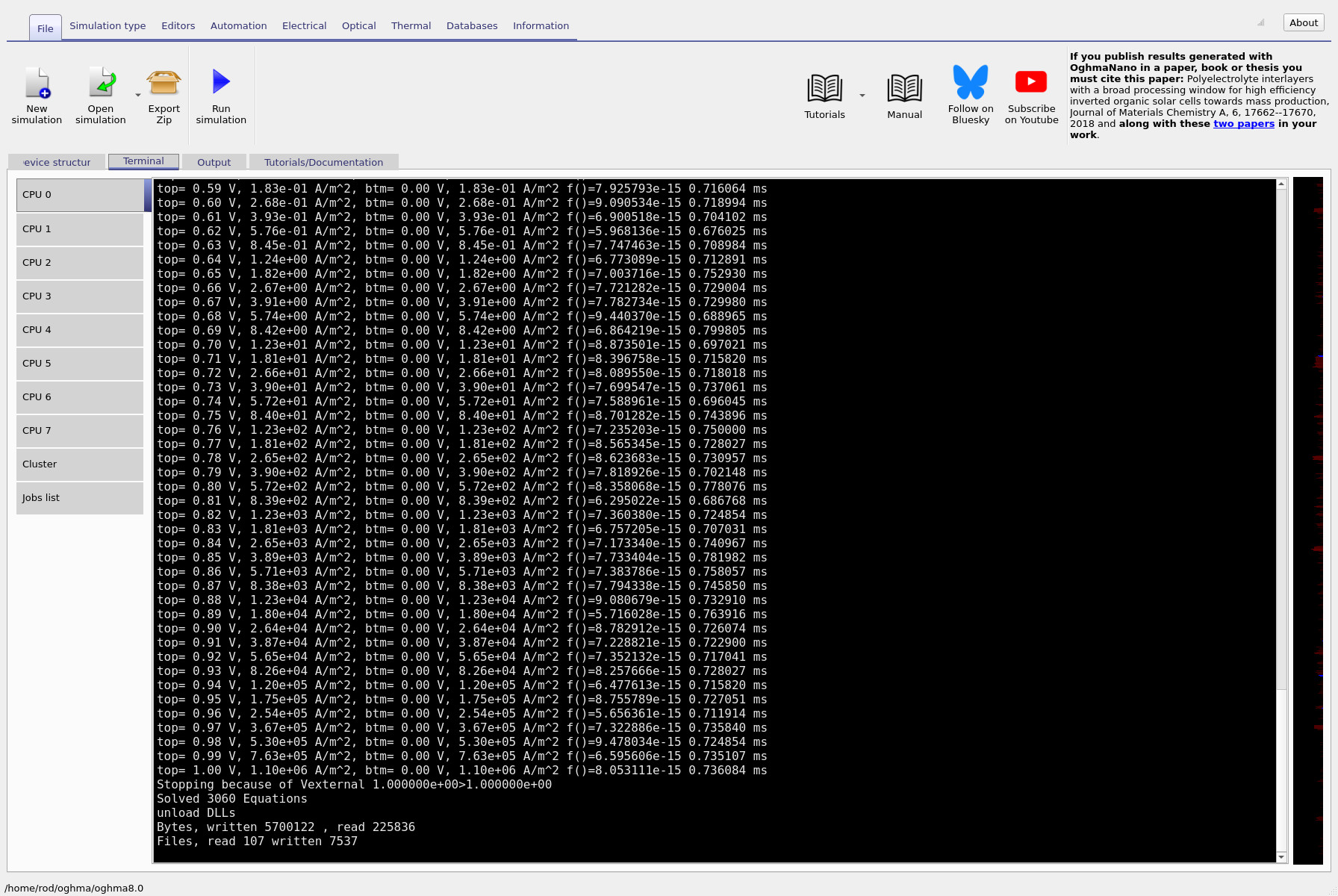
Em seguida, volte ao editor de Malha elétrica e desative a direção z. A malha agora deve representar uma simulação 2D (y–x) (??). Execute a simulação novamente e compare a saída do terminal (??). Você deve ver uma redução dramática no tempo de execução, com os tempos por passo caindo para apenas alguns milissegundos. É importante que o valor final de corrente informado ao final da execução seja numericamente idêntico ao caso 3D.
Por fim, desative também a direção x, deixando apenas a direção de transporte y. Isso reduz o problema a uma simulação de drift–diffusion puramente 1D (??). Execute o solver mais uma vez e examine a saída do terminal (??). Nesse caso o tempo por passo é efetivamente zero, mas a corrente final em top = 1.00 V é a mesma das execuções 2D e 3D.

Essa comparação ilustra um princípio central da modelagem de dispositivos. À medida que a dimensionalidade é reduzida, a simulação se torna dramaticamente mais rápida porque o número de incógnitas diminui rapidamente (muitas vezes escalando aproximadamente com o cubo da densidade de malha). Entretanto, como o dispositivo agora é lateralmente uniforme, reduzir a dimensionalidade não muda o resultado físico. Você está resolvendo as mesmas equações para a mesma estrutura, apenas expressas em uma representação de coordenadas mais eficiente. A principal conclusão é que dimensionalidade mais alta não produz automaticamente física diferente ou melhor. Ela só agrega valor quando o dispositivo em si contém variação lateral genuína. Uma vez removida essa variação, simulações 3D, 2D e 1D colapsam para a mesma solução elétrica— diferindo apenas no custo computacional.
Etapa 5: Observe que os resultados numéricos são idênticos
Agora observe atentamente as saídas. Escolha uma única linha de tensão (por exemplo a entrada em top = 1.00 V) e compare as correntes calculadas entre as execuções 3D, 2D e 1D. Você deve encontrar os valores iguais (dentro da precisão numérica). Esta é a lição principal: uma vez que removemos a assimetria, o dispositivo é efetivamente 1D, então 2D e 3D não acrescentam nova física — apenas aumentam o tempo de execução.
Isso é tudo para a Parte B. Na Parte C, veremos questões de estabilidade numérica que podem surgir em simulações 2D e 3D, e começaremos a transformar este diodo em um problema semelhante ao de uma célula solar introduzindo luz e observando como a iluminação altera a resposta do dispositivo.
👉 Próximo passo: Continue para a Parte C.