레이 트레이싱 튜토리얼 (Part C): 검출기 이동
이전 파트에서는 간단한 광학 시스템을 구성하기 위해 프리즘과 렌즈를 편집했습니다. 이 파트에서는 보라색 검출기에 집중합니다. OghmaNano에서 검출기는 평평한 평면으로 정의됩니다 (CCD 센서와 유사함): 광선이 이 평면에 도달할 때마다 검출기 출력 파일에 기록됩니다.
Step 1: 검출기 편집기 열기
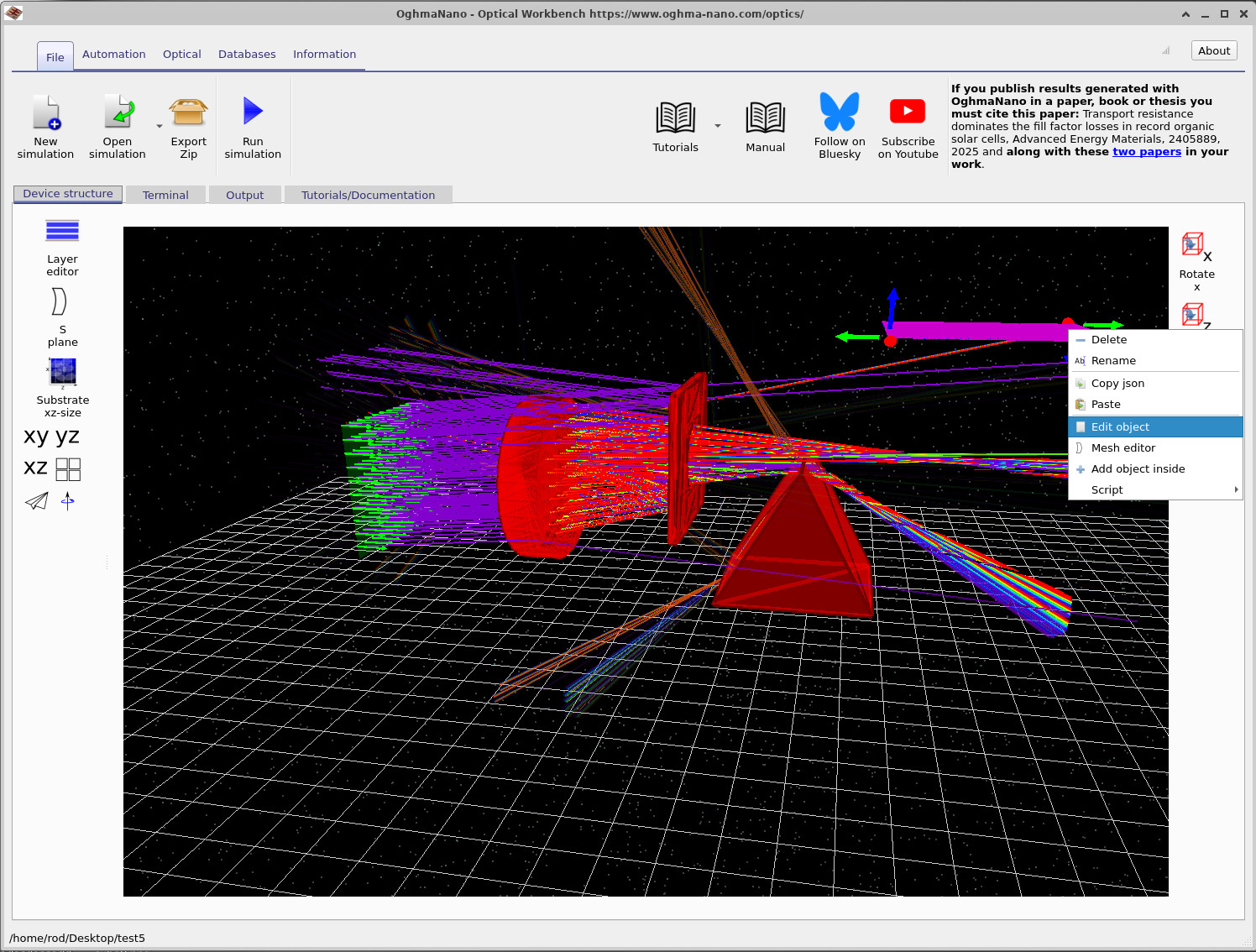
Part B에서 완료한 장면(렌즈, 프리즘, 조리개 및 검출기)에서 시작합니다. 보라색 검출기 평면을 찾습니다. 이를 마우스 오른쪽 버튼으로 클릭하고 컨텍스트 메뉴에서 Edit object를 선택합니다. 이는 ??에 표시된 것과 같습니다. 그러면 ??에 표시된 일반 객체 편집기 창이 열립니다.
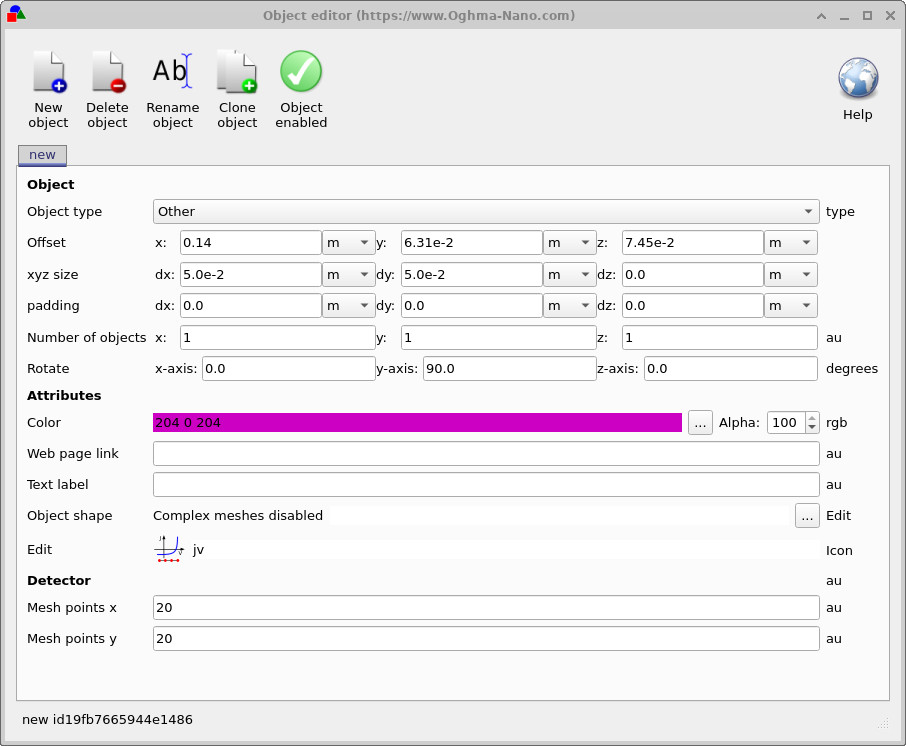
dx, dy), 회전 및 메쉬 포인트 수(검출기 픽셀)를 변경할 수 있습니다.
검출기는 다음과 같은 물리적 크기를 갖는 직사각형 평면으로 정의됩니다:
- dx – x 방향 크기(너비),
- dy – y 방향 크기(높이).
??에서 검출기는
dx = 5.0e-2 m 및 dy = 5.0e-2 m로 설정되어 있으며,
이는 5 cm × 5 cm 센서를 의미합니다.
편집기 하단에는 다음도 표시됩니다:
- Mesh points x = 20
- Mesh points y = 20
이는 검출기가 20 × 20 격자 구획으로 나뉘어 있음을 의미합니다 – 즉 사실상 400개의 거친 “CCD 픽셀”입니다. 이는 실제 카메라보다 훨씬 낮은 해상도이지만, 광학 시스템에서 광선을 추적할 때 일반적으로 충분하며 시뮬레이션 시간을 합리적으로 유지합니다. 더 세밀한 빔 프로파일이 필요하면 나중에 이 값을 언제든지 증가시킬 수 있습니다.
Step 2: 검출기 평면 회전
객체 편집기에서는 검출기의 방향도 확인할 수 있습니다. 이 예제에서 검출기는 이미 y축을 중심으로 90° 회전되어 들어오는 광선을 향하도록 설정되어 있습니다. 회전 동작을 이해하기 위해 다음과 같이 설정을 변경합니다:
- Rotate x-axis를
90.0도로 설정합니다. - Rotate y-axis를
90.0도로 설정합니다.
검출기는 내부적으로 x–y 평면에 있는 평평한 평면으로 정의됩니다. x와 y 축 모두에서 90° 회전시키면 거의 수평에 가까운 방향에서 장면 내에서 명확한 수직 평면으로 전환됩니다. 편집기를 닫고 3D 창에서 볼 때 검출기가 이제 수직으로 나타나는지 확인하십시오.
Step 3: 검출기를 조리개에 더 가깝게 이동
다음으로 검출기를 이동하여 조리개 바로 뒤에 위치하도록 합니다. 이렇게 하면 더 선명한 빔 프로파일과 더 컴팩트한 광학 구성을 얻을 수 있습니다.
- 메인 Optical Workbench 창에서 보라색 검출기 평면을 직접 왼쪽 클릭합니다.
- 조리개 표면 방향으로 드래그합니다. 올바른 객체가 선택되도록 마우스가 검출기 자체 위에 있는지(뒤의 빈 공간이 아님) 확인하십시오.
- 검출기가 프리즘이나 다른 객체와 충돌하여 더 이상 이동하지 않는 경우, 드래그하는 동안 Shift 키를 누르십시오. 이렇게 하면 일시적으로 충돌 감지가 무시되어 다른 메쉬를 통과하여 검출기를 이동할 수 있습니다.
검출기를 대략적으로 다음 위치에 배치합니다: ??.
Step 4: 장면 정리 (선택 사항)
플레이그라운드를 단순화하기 위해 프리즘 중 하나를 제거할 수 있습니다. 프리즘을 마우스 오른쪽 버튼으로 클릭하고 Delete를 선택합니다. 이제 장면에는 다음만 남게 됩니다:
- 렌즈 하나,
- 조리개 판 하나,
- 검출기 평면 하나.
시뮬레이션을 다시 실행하십시오. 검출기가 조리개 가까이에 배치되면 빔 프로파일이 더 선명해지고 렌즈가 광선을 검출기 영역에 어떻게 집속하는지 더 쉽게 확인할 수 있습니다.

👉 다음 단계: Part D로 계속 진행하여 장면에 새로운 객체를 삽입하는 방법을 배우십시오.