200 mm 単焦点レンズチュートリアル(パート A):読み込み、確認、および基準レイトレースの実行
1. はじめに

単焦点レンズ とは固定焦点距離を持つレンズであり、焦点距離が連続的に変化するズームレンズとは対照的です (?? を参照)。 単焦点レンズは写真および撮像システムで広く使用されています。というのも、ある設計を 1 つの焦点距離に対して最適化できるからです。同等仕様のズームと比較すると、単焦点はしばしば 光学的により単純で、通常より大きな実用開口をサポートし、同じサイズとコストで より良好なオフ軸性能を実現できます。このチュートリアルでは、200 mm 単焦点を ジオメトリ優先の「光線を読む」演習として用います。目的はメリット関数ではなく、 不適切な絞り配置、意図しないクリッピング、および誤った検出器面位置を素早く見抜く方法を学ぶことです。
このチュートリアルでは、200 mm 単焦点レンズを用いて、多枚構成の写真用レンズを 3D で確認し、 基準レイトレースを実行し、出力を定性的に解釈する方法を示します。 目的はメリット関数でレンズを「採点」することではありません。むしろ、 ジオメトリと光線経路の読み方を学ぶことで、クリッピング、絞り位置の誤り、 およびオフ軸感度を素早く見抜けるようになることです。
このチュートリアルのワークフローは、専門的な光学設計における標準的な実務を反映しています: 最適化や定量的メリット関数を導入する前に、まずレンズモデルは 光線経路、絞り位置、および検出器の挙動を確認することで幾何学的に検証されます。 これらの確認に失敗した場合、数値指標には意味がありません。
2. 200 mm 単焦点レンズ例の読み込み
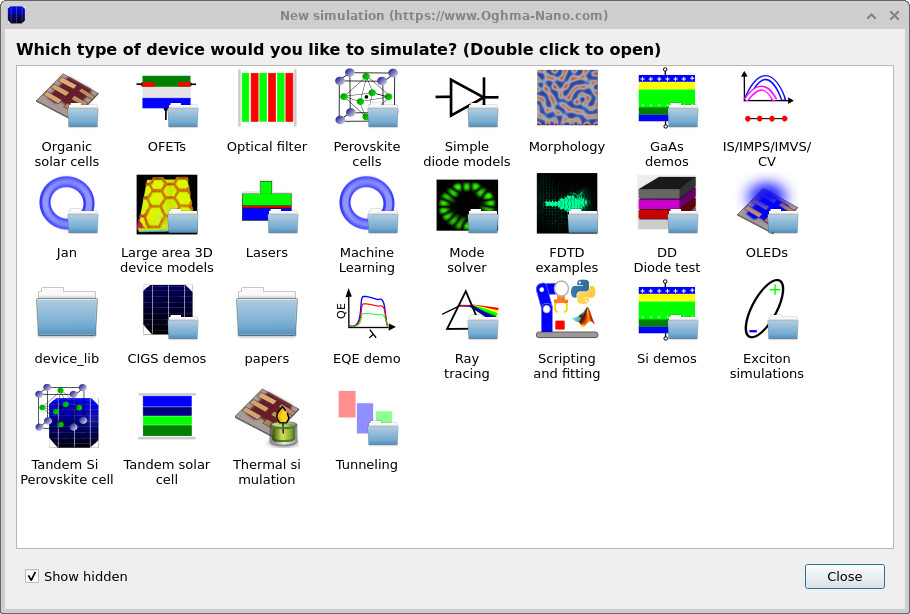
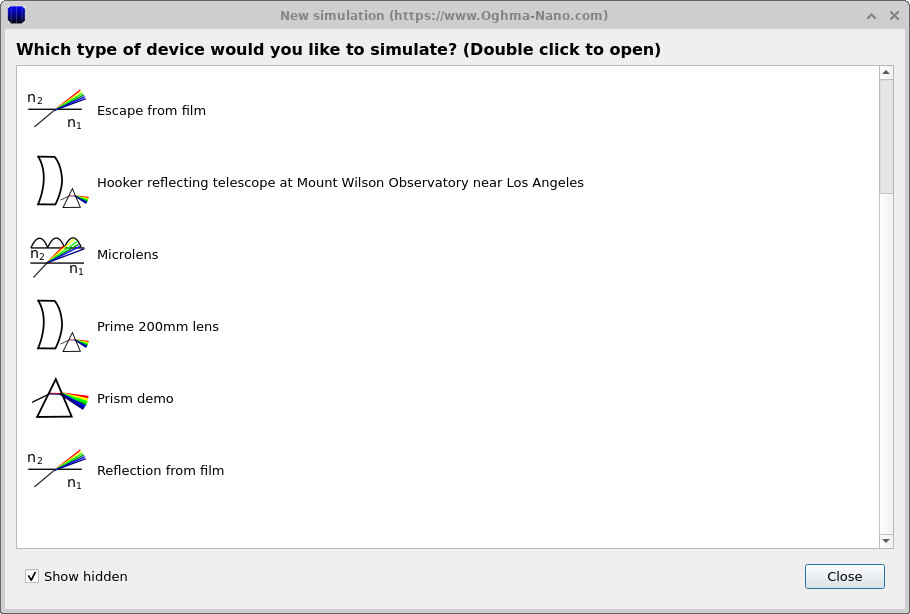
メインウィンドウから New simulation をクリックします。これによりシミュレーションライブラリが開きます (??)。 Ray tracing をダブルクリックして光学例に入り (??)、 次に Prime 200mm lens(または 200mm prime lens)を選択し、 作業ディレクトリ(例えばホームフォルダ)を指定します。
3. 3D シーンに慣れ、基準レイトレースを実行する
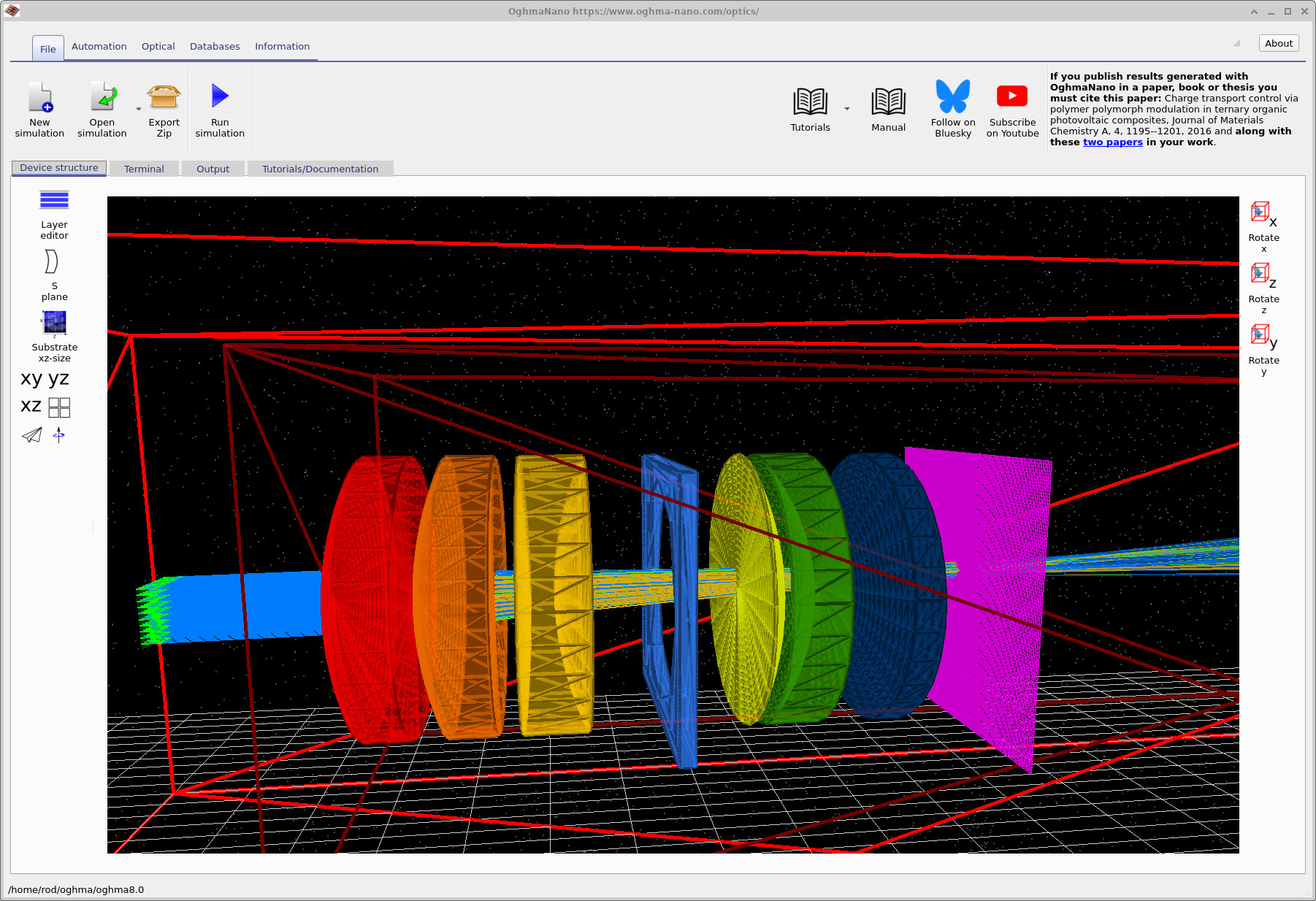
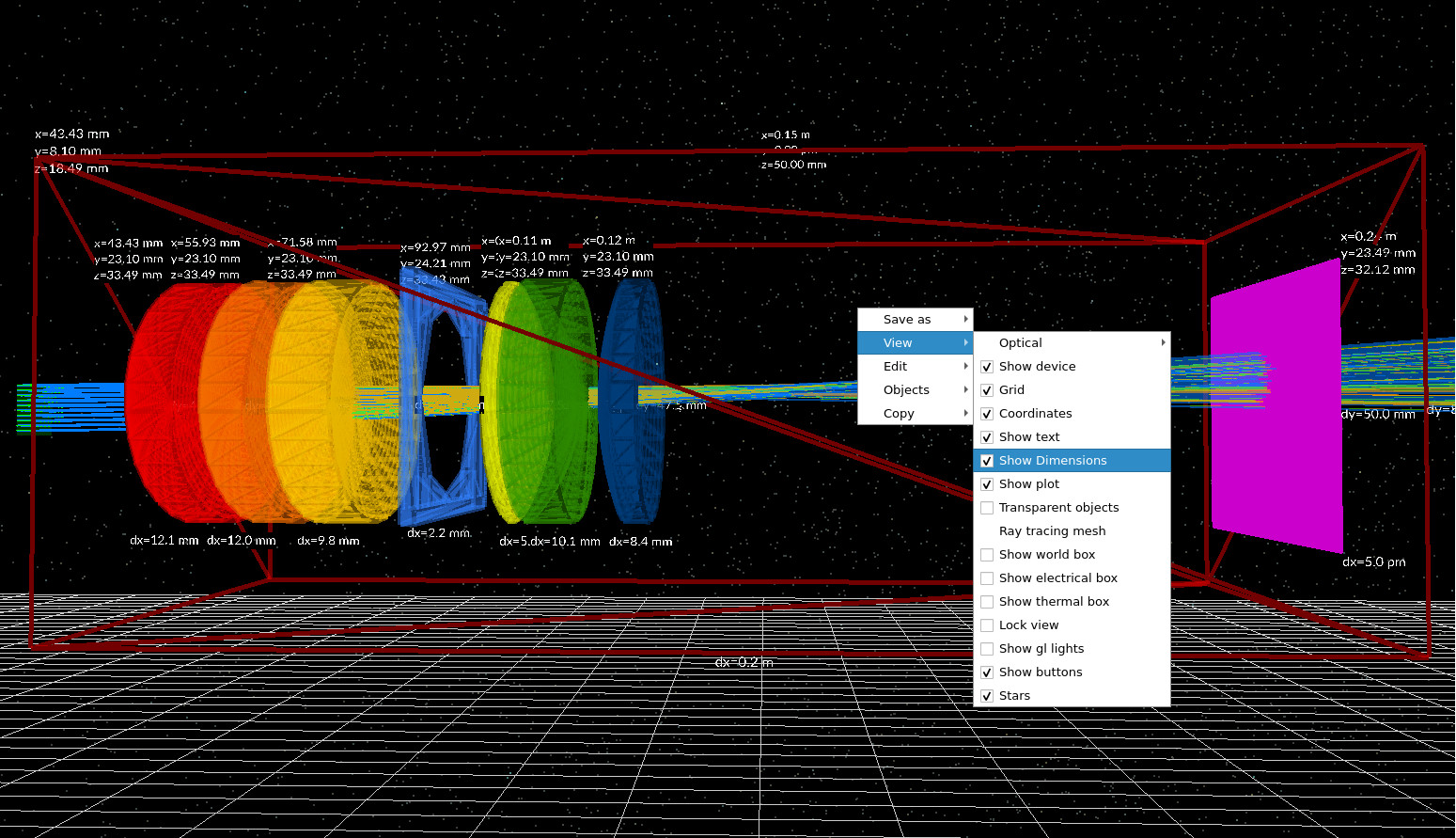
読み込み後、Optical Workbench は ?? のような表示で開くはずです。 光軸は左から右へ走っています。左側には 1 つ以上の light sources (緑)、中央には lens elements(色付きガラス面)、 右側には detector plane(紫)が見えるはずです。
この設計は「前方光学系」と検出器付近の「後方セクション」という観点で考えることができます。 パート A における重要点は、(i) 主なレンズ要素、(ii) 開口 / 絞りオブジェクト、 および (iii) 検出器面を識別することです。 (参考までに:このデモが基にしている公開済みの望遠設計では、 可動する対物側セクションと、フィルム / センサ面に対して固定された後方補正要素が使われています。)
マウスを使って確認してください:黒い背景上でドラッグして視点を回転し、要素間隔を調べます。 目的は、何かを実行する前に、絞りと検出器を視覚的に自信を持って見つけられるようになることです。
Run simulation(メインツールバーの青い三角形)をクリックします。実行が完了すると、 光線が光源から出てレンズスタック全体を通過し、検出器面に到達するのが見えるはずです (?? を参照)。
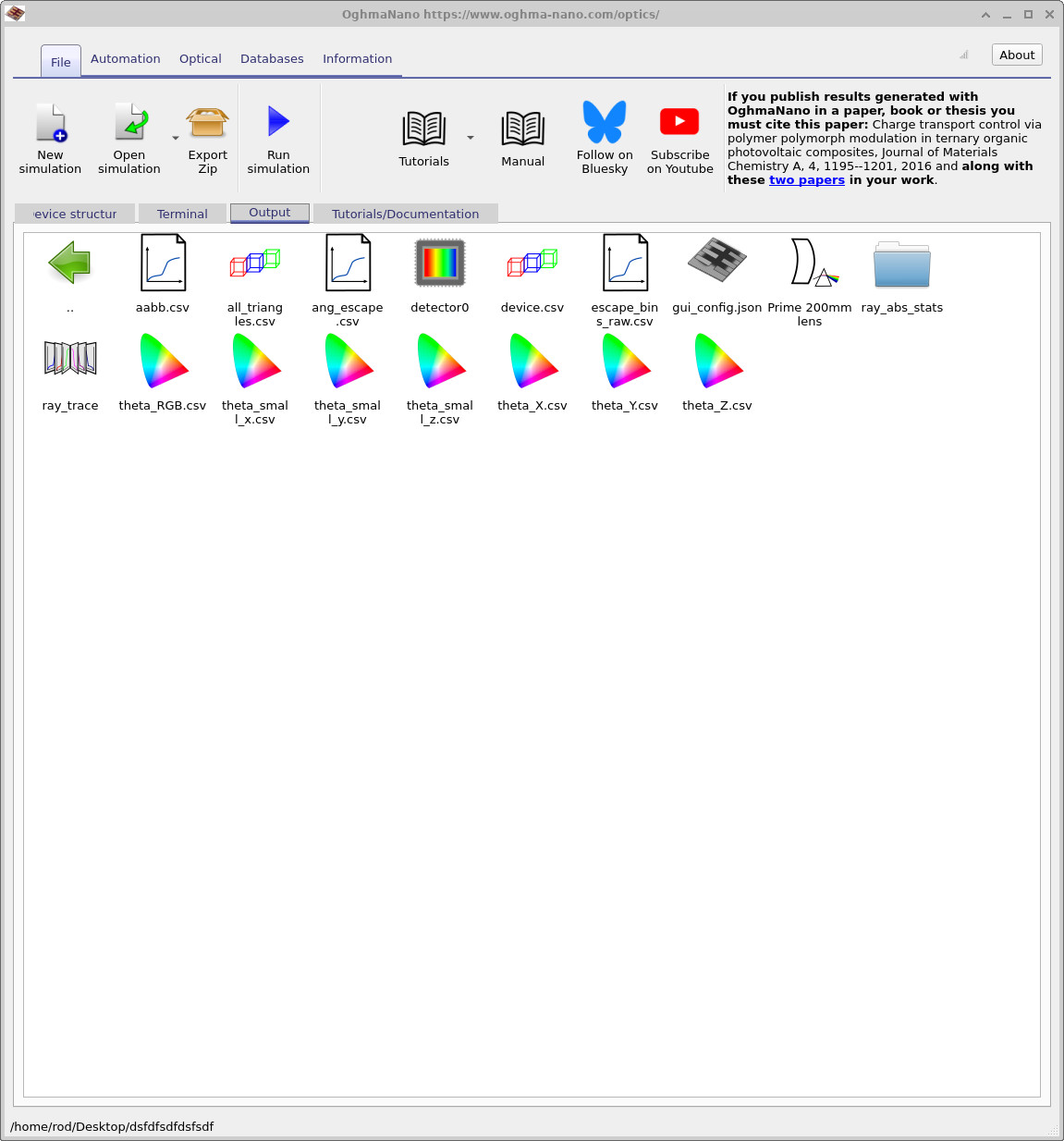
4. 主要出力の場所を見つけて開く
Output タブへ切り替えます。detector フォルダ(通常は detector0)と、
関連するレイトレーシング出力が見えるはずです
(例:
??)。
各 detector には専用の出力ディレクトリがあります。detector0 を開いてください
(「カメラ / CCD」アイコンで描かれています)。
detector0 をダブルクリックします。
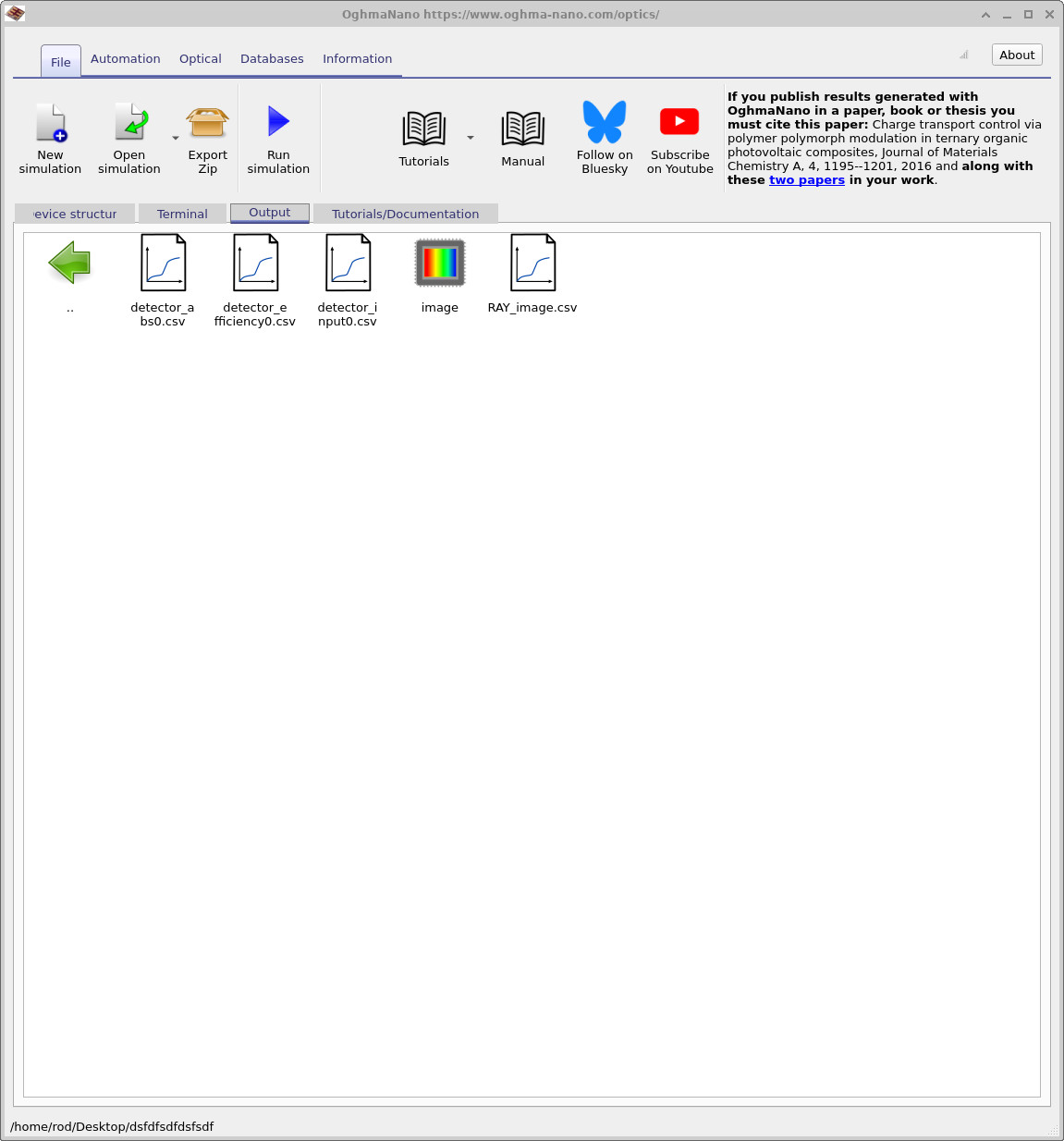
detector0 の内部。RAY_image.csv を開きます。
detector0 を開くと、RAY_image.csv を含むファイルが見えるはずです
(例:
??)。
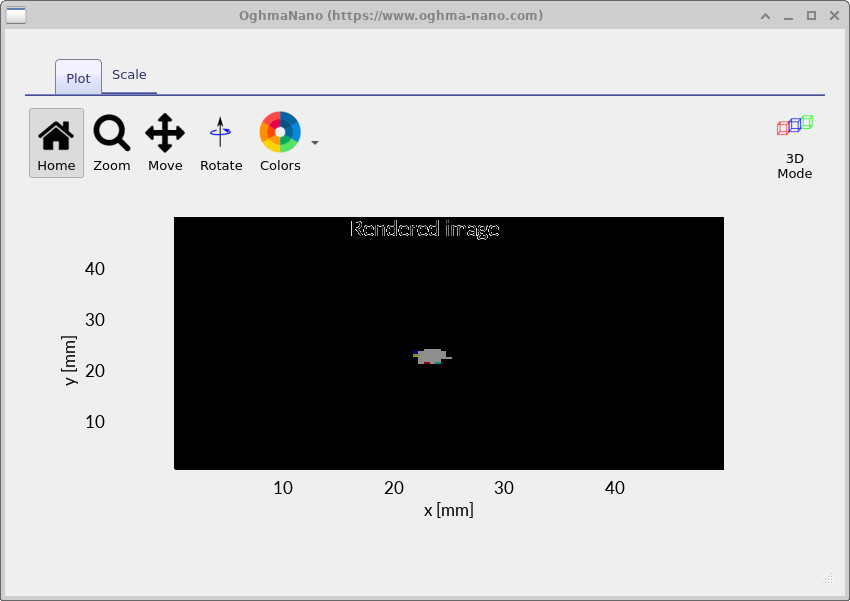
RAY_image.csv をダブルクリックして detector 画像を表示してください。
実際のカメラでは、この detector 面はセンサ / フィルム面に対応します。すなわち、
現代のデジタルカメラでは、この面に配置された CMOS / CCD センサ上にこの像が形成されることになります。
素早い焦点確認(検出器面を動かす)
直感を養う最も速い方法は、レンズ要素を動かすことではなく、 detector plane を動かすことです。 概念的には、これはレンズに対してセンサを前後に動かし、 ぼけがどのように変化するかを見ることに相当します。 目標は、detector 上で最小のスポットになる位置を(目視で)見つけることです。
まず、画面上の寸法表示を有効にします。黒い背景を右クリックし、View を選び、
Show dimensions を有効にしてください
(?? を参照)。
これで、オブジェクトの x/y/z 位置と、
厚さ / 長さ(dx などとして表示)が見えるようになります。
次に、光軸に沿って detector plane を前後に動かし、スポットがどのように変化するかを観察します。 分かりやすい実演のために、極端な位置(明らかに前すぎる位置、その次に明らかに後ろすぎる位置)へ動かし、 その後スポットが最も小さくなる位置を探してください。 変更のたびにシミュレーションを再実行してもよいですし、 (素早い定性的確認として)単に detector plane 上での光線交点の移動を観察するだけでもかまいません。
「最良焦点」とは最も小さいスポットになる位置ですか? このチュートリアルでは、はい - 最小のフットプリントを最良焦点条件として扱ってください。 (後に RMS スポット半径のような指標がこの考え方を厳密に定式化しますが、 ジオメトリ優先ワークフローを学ぶためにそれは不要です。)
「センサから最後のレンズ要素までの距離」の数値が欲しい場合は、
画面上のジオメトリから直接見積もることができます:
最終レンズ要素の x 座標(その基準位置)を読み取り、その厚さ dx を加え、
detector plane の x 座標から差し引いてください。
これにより、最後の要素の後面と detector plane の間のおおよその距離が得られます。
目視で最良焦点だと判断した位置でもこれを繰り返し、その値を記録してください。
今できること(パート A)
- 読み込みと操作:Optical Workbench 内で 200 mm 単焦点レンズデモを読み込み、操作できる。
- 基準レイトレースを実行:光線が detector plane に到達することを確認できる。
- 出力を開く:
detector0/RAY_image.csvを開き、素早い健全性確認として表示できる。 - 目視で最良焦点を探す:detector plane を移動し、最小スポットを探せる。
出力が「おかしい」と見える場合の一般的な確認事項
- detector plane がレンズ群の後方にあり、ビームの方向を向いていることを確認する。
- 3D ビューが視覚的に混み合う場合は、光線密度を下げる。
- 正しい detector フォルダを開いていることを確認する(3D シーン中のマゼンタ色の面)。
- detector を動かしてもスポットサイズがまったく変わらない場合は、光線が実際に detector と交差しているか再確認する。
👉 次のステップ: パート B に進み、主光線と周辺光線を識別し、 目視でクリッピング / ケラレを診断し、「指標以前」のレンズ健全性確認ワークフローを構築してください。