성능 지표(Part A): OghmaNano에서 광선 추적 광학 성능 평가
1. 소개
광선 추적은 광선 번들, detector 이미지, 3D geometry와 같은 대량의 시각적 출력을 생성할 수 있지만- "좋아 보인다"는 설계 기준이 아닙니다. 이 튜토리얼에서는 성능 지표(FoM)에 초점을 맞춥니다: detector 이미지 및 광선 추적 통계를 비교, 순위화, 해석할 수 있는 잘 정의된 숫자로 압축하는 정량적 지표입니다.
이 튜토리얼에서는 이러한 성능 지표가 개별 광학 시스템에 대해 어떻게 생성되며 물리적으로 무엇을 나타내는지 살펴봅니다. spot size (σx, σy), RMS spot radius, major and minor axis spot radii, spot ellipticity 및 spot orientation angle, encircled energy radii (EE50, EE80, EE90, EE95, EE99), halo energy fraction, 그리고 energy concentration ratios를 포함한 일반적인 지표를 추출하고 해석합니다. 각 지표가 어떻게 구성되는지, 언제 유용한지, 그리고 광학 성능의 어떤 측면을 포착하거나 혹은 가리는지 이해하는 데 중점을 둡니다.
이러한 성능 지표를 단일 설계 수준에서 이해하면, 이를 체계적으로 적용할 수 있습니다. 동일한 지표는 OghmaNano의 parameter scan tool에서 설계 공간 전반의 광학 성능을 추적하고 최적화를 구동하는 데 직접 사용됩니다. 따라서 이 튜토리얼은 광학 성능 평가를 위한 개념적 기반을 제공하며, 함께 제공되는 scan 튜토리얼은 이러한 성능 지표를 대규모로 적용하는 방법을 보여줍니다.
cting2. Cooke triplet 예제 열기
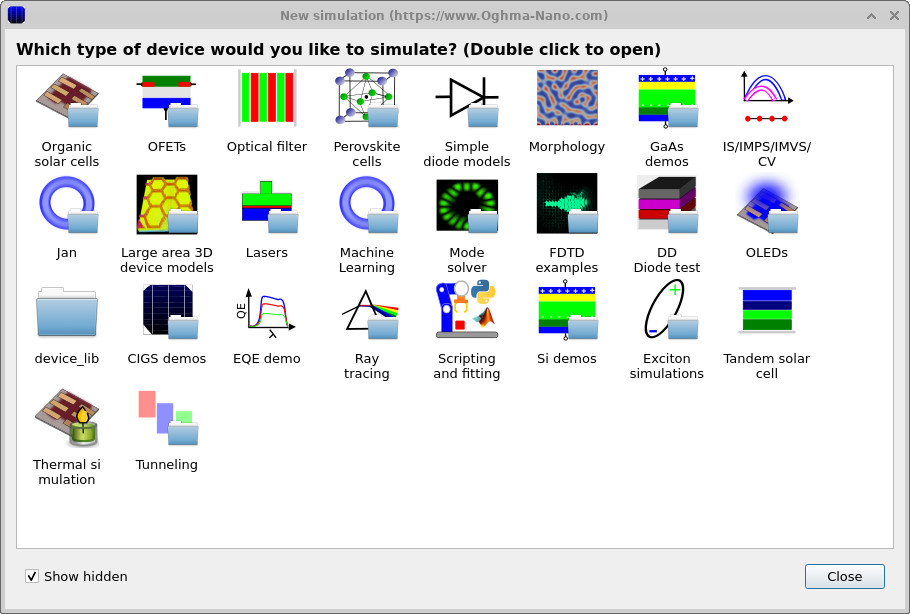
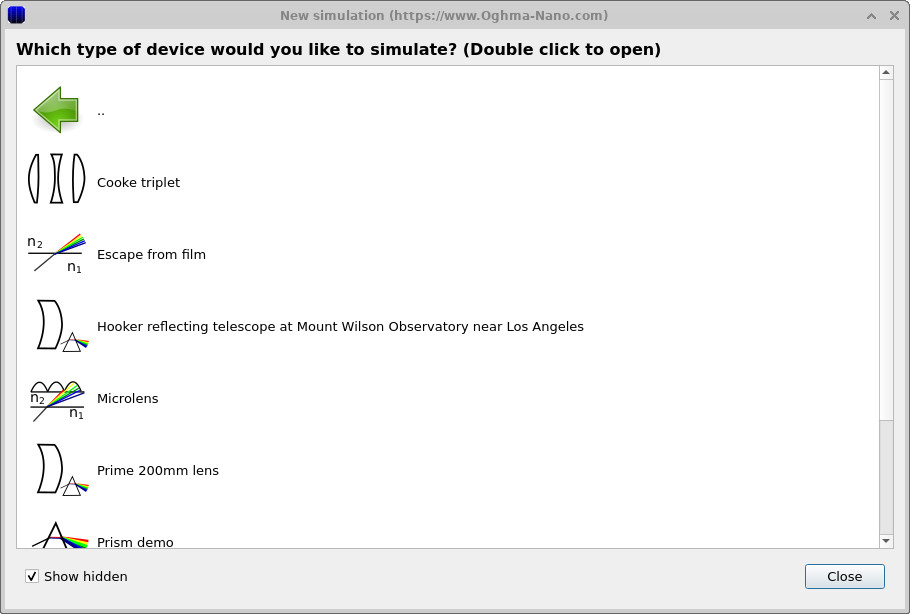
광학 모델을 처음부터 구축하는 대신 성능 지표 평가에 집중할 수 있도록 사전 구성된 광선 추적 예제에서 시작합니다. Windows 시작 메뉴에서 OghmaNano를 시작합니다. 메인 창에서 New simulation 버튼을 클릭하여 시뮬레이션 라이브러리를 엽니다. 이는 그림 2a–b에 나와 있습니다.
소자 범주 목록에서 Ray tracing을 더블클릭하여 S-plane 광학 데모를 엽니다. 이 목록에서 Cooke triplet 예제를 명시적으로 선택하고 엽니다. 이 고전적인 다중 요소 렌즈는 의도적으로 불완전하지만 잘 거동하는 광학 시스템을 제공하므로, 서로 다른 성능 지표가 광학 설계의 변화에 어떻게 반응하는지 보여주기에 이상적입니다.
💡 팁: 시뮬레이션은 C:\와 같은 로컬 드라이브에 저장하십시오.
FoM에 집중하는 경우에도 scans와 optimisers는 여전히 CSV 출력과 (선택적으로) ray/mesh 파일을 생성합니다.
네트워크, USB 또는 클라우드 동기화 폴더는 I/O 제한으로 인해
상당히 더 느리게 실행될 수 있습니다.
3. 광학 시스템을 검사하고 성능 지표가 어디에서 나오는지 식별하기
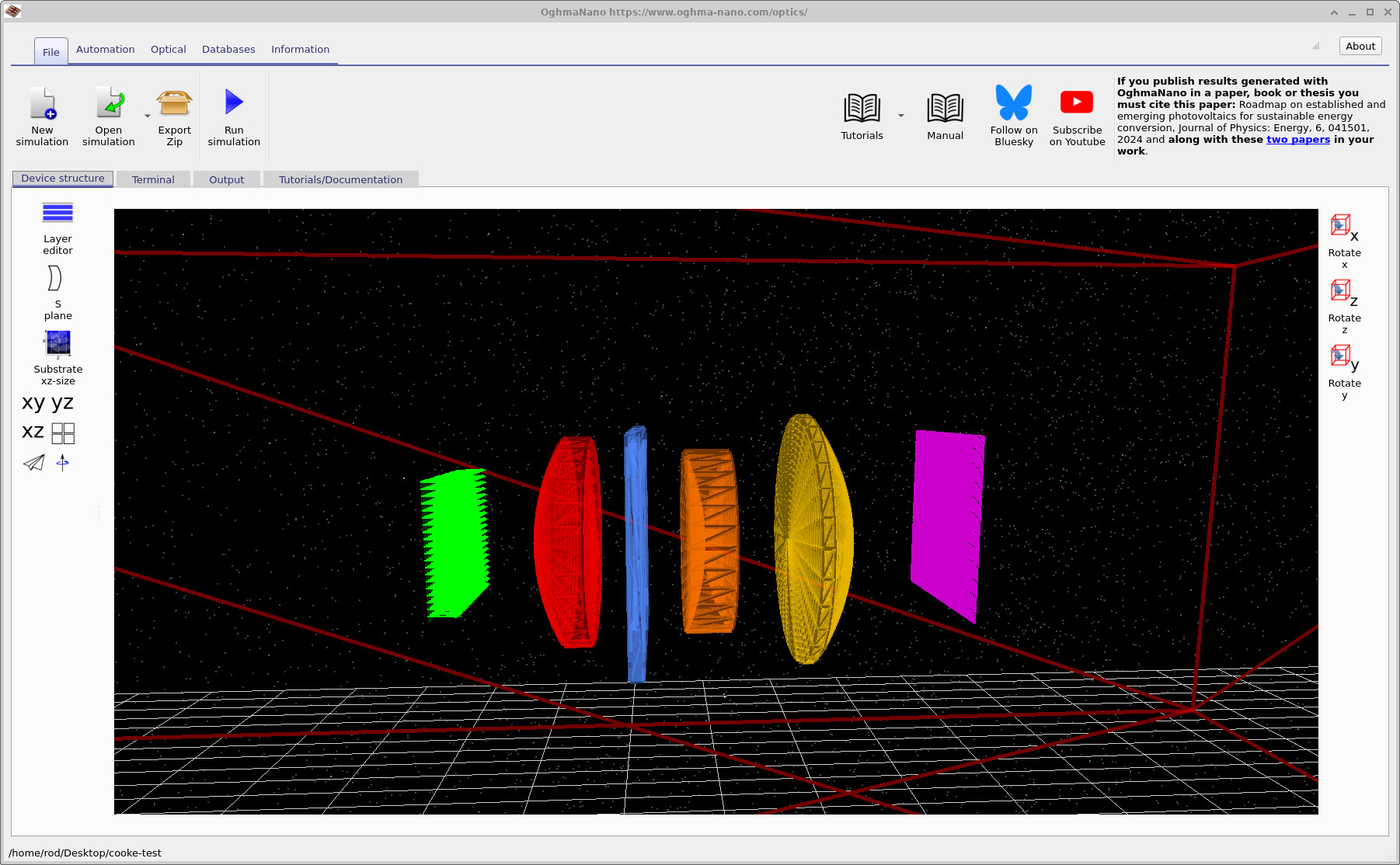
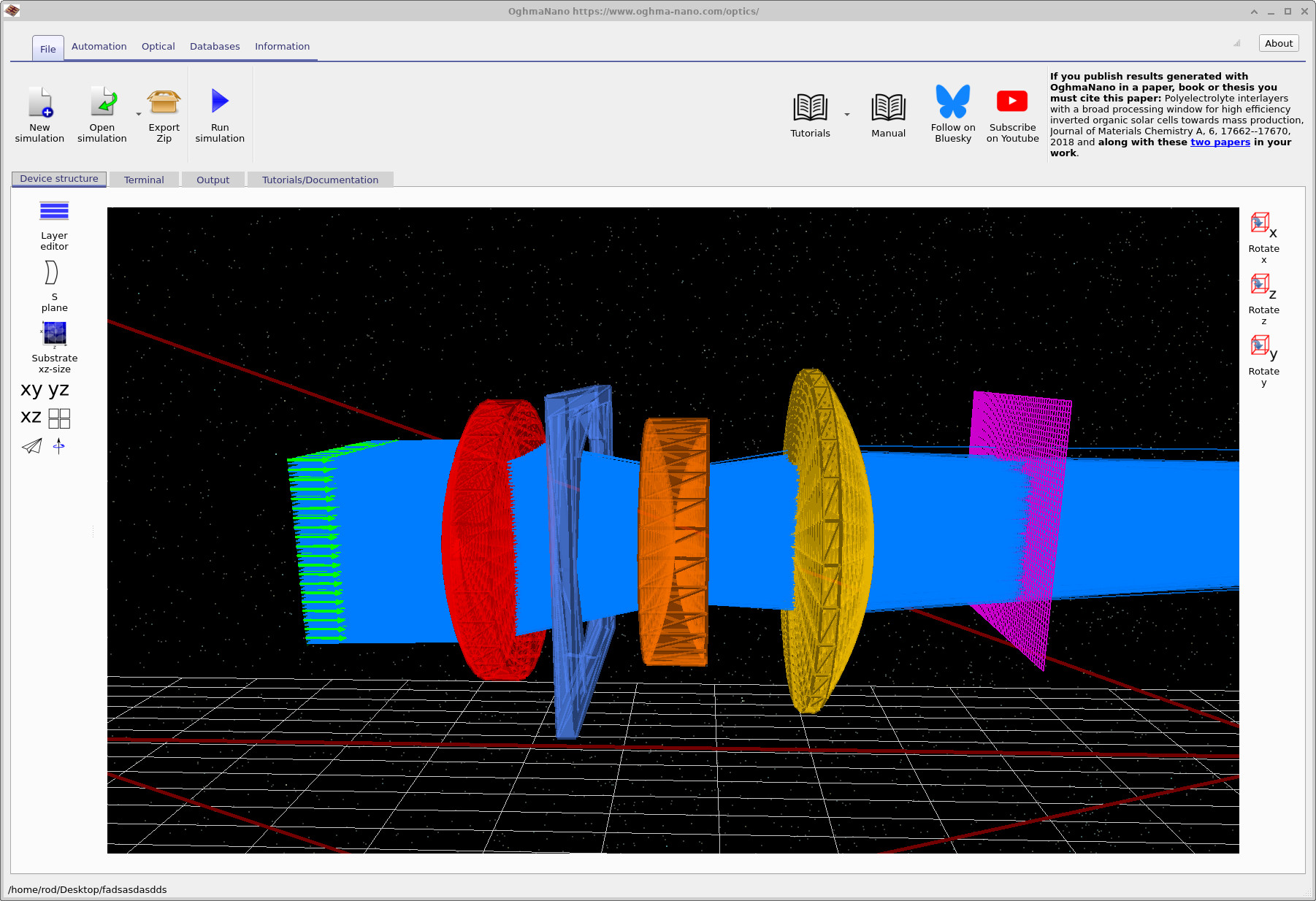
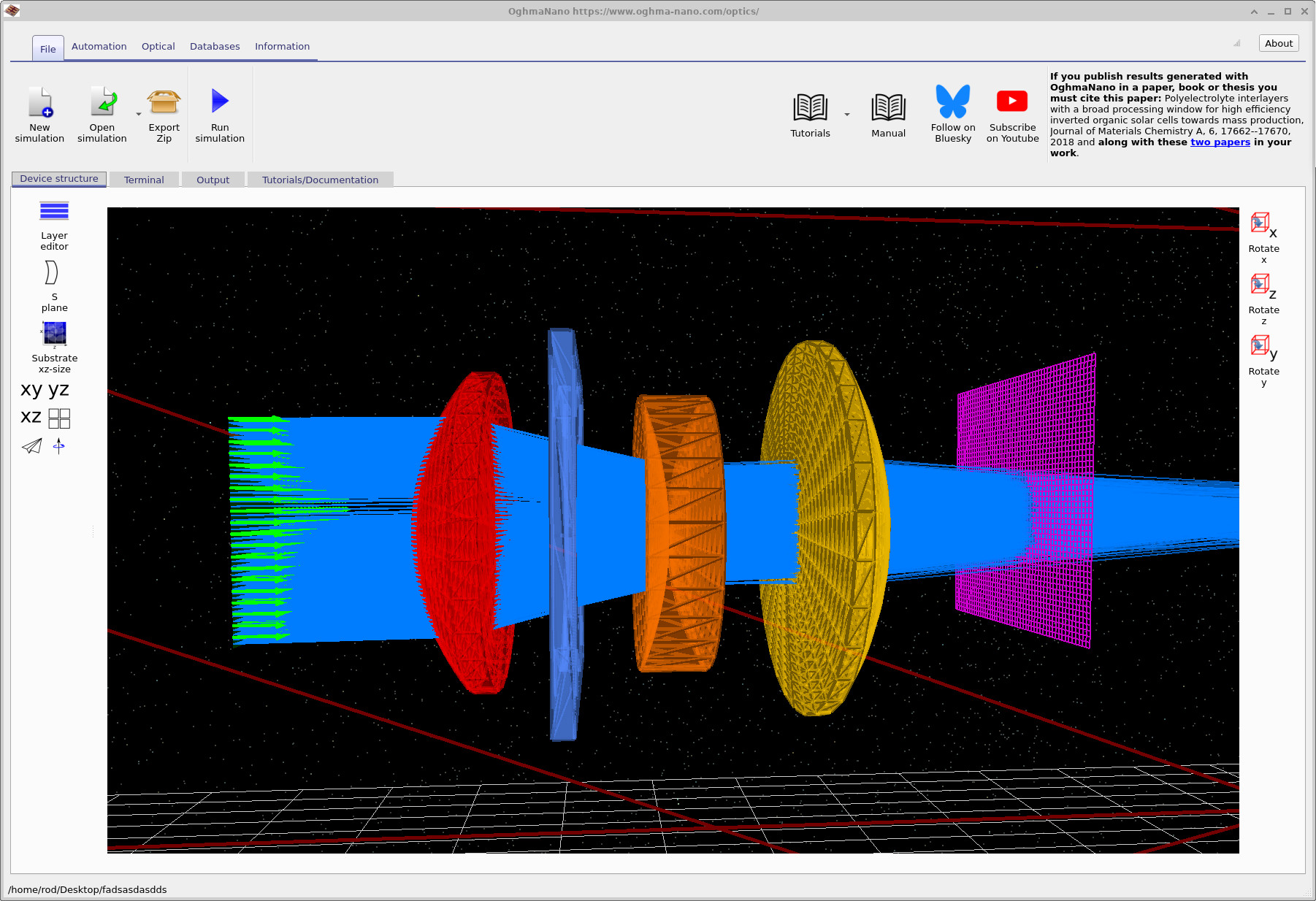
예제를 연 후 메인 창은 ??와 같아야 합니다. 3D 보기는 source에서 detector까지의 전체 광학 시스템을 보여줍니다. 왼쪽에서 오른쪽으로 녹색 화살표는 source가 방출한 입사 광선을 나타냅니다. 이 광선은 먼저 시스템의 첫 번째 렌즈인 빨간색 광학 요소와 만나게 됩니다. 그 다음의 얇은 파란색 요소는 aperture stop으로, numerical aperture를 제한하고 어떤 광선이 시스템을 통해 전파될 수 있는지를 제어합니다.
aperture의 하류에서 광선은 두 번째 렌즈(주황색으로 표시됨)와 세 번째 렌즈(노란색으로 표시됨)를 차례로 통과합니다. 이 세 개의 굴절 요소는 함께 고전적인 Cooke triplet을 형성합니다. 이는 19세기 후반에 개발된 역사적으로 중요한 3요소 렌즈 설계로, 단순한 구면과 일반적인 광학 유리만을 사용하여 spherical aberration, coma, 및 astigmatism을 보정할 수 있는 능력으로 높이 평가됩니다. Cooke triplet의 변형은 오늘날에도 많은 사진 및 이미징 렌즈의 개념적 기반으로 널리 사용되고 있습니다.
마지막으로 광선은 보라색 격자로 표시된 detector plane과 교차합니다. 모든 성능 지표는 궁극적으로 이 평면 위의 광선 분포에서 도출됩니다. 광선 교차의 공간적 패턴은 centroids, spot radii, standard deviations, encircled-energy curves, 및 관련된 광학 성능 측정값과 같은 정량적 지표로 축약됩니다.
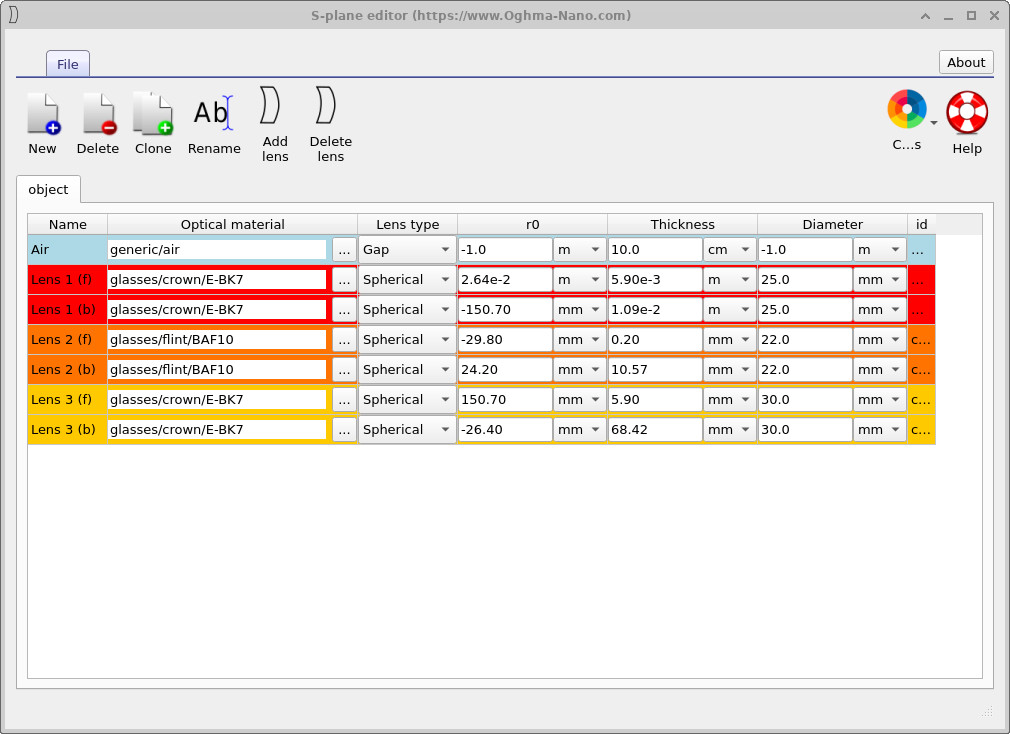
동일한 광학 시스템은 파라메트릭하게 S-plane editor에 표현되며, 이는 왼쪽 툴바의 S-plane 버튼을 클릭하여 열 수 있습니다. 이는 ??에 나와 있습니다. S-plane table의 각 행은 3D 보기의 하나의 실제 surface에 직접 대응하며, 여기에는 세 개의 렌즈 요소와 aperture stop이 포함됩니다. 이 튜토리얼에서는 이러한 파라미터를 수정할 필요는 없습니다. 여기서의 역할은 어떤 양이 시스템 geometry를 정의하는지, 그리고 어떤 파라미터가 나중에 자동화된 scans를 수행할 때 변화될 것인지를 명확히 하는 것입니다.
Cooke triplet 자체에 대한 보다 자세한 논의 — 광학 layout, 설계 철학, 그리고 역사적 배경을 포함 — 는 전용 튜토리얼 Cooke Triplet 튜토리얼 (Part A) 를 참조하십시오.
4. 시뮬레이션 출력과 detector 성능 지표 검사
시뮬레이션을 실행한 후 시스템이 합리적으로 거동하는지에 대한 첫 번째 확인은 광선 추적 자체를 검사하는 것에서 시작됩니다 (??). 여기서는 source에서 방출된 광선이 Cooke triplet의 세 개의 굴절 요소를 통과하고, aperture stop에 의해 공간적으로 필터링되며, 마지막으로 detector plane과 교차하는 모습이 표시됩니다. 이 보기는 주로 정성적입니다: 즉, 광선이 의도치 않게 clipping되지 않는지, 파국적으로 발산하지 않는지, 그리고 광학 axis, 요소 순서, aperture 배치가 예상과 일치하는지를 확인할 수 있게 합니다.
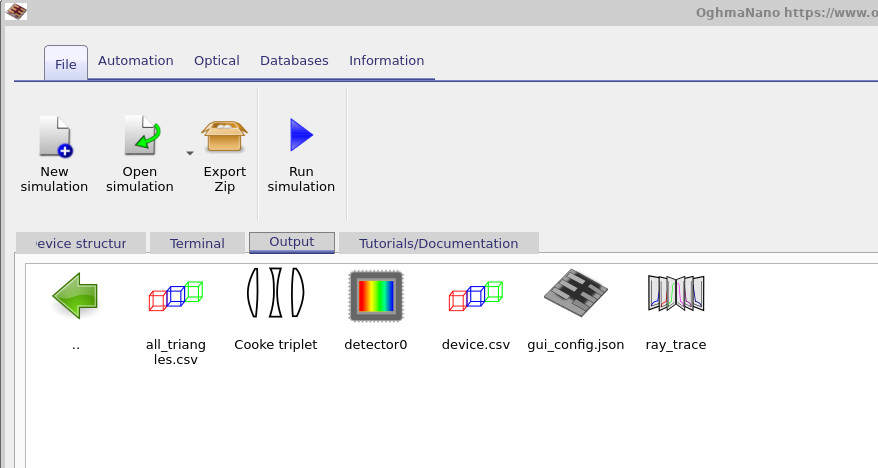
정량적 분석은 Output tab에서 시작됩니다
(??).
이곳에는 광선 추적 엔진이 생성한 모든 파일이 들어 있습니다. device.csv 파일은
렌즈 surface 및 detector planes를 포함한 광학 장면의 전체 geometry description을
저장합니다. all_triangles.csv 파일에는 내부적으로 광선–surface 교차 테스트에 사용되는
triangulated mesh가 포함되어 있습니다. 이 파일을 시각화하면 사용자는 이상화된 해석적 surface가 아니라
실제 계산 geometry를 검사할 수 있습니다.
ray_trace 폴더는 시스템을 통과하는 개별 광선 경로의 상세한 표현을
제공하며, aberrations, vignetting 또는 예상치 못한 광선 손실을 진단하는 데 유용합니다.
그러나 성능 분석에서 가장 중요한 폴더는 detector0입니다.
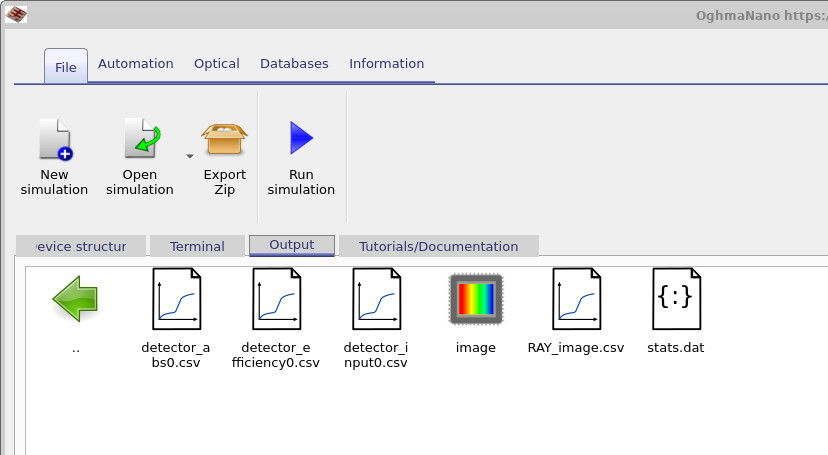
이 폴더를 더블클릭하면
??에
표시된 detector output directory가 열립니다.
detector directory 내에서 detector_abs_0.csv 파일은 detector 표면에
흡수된 광 파워의 공간 분포를 기록합니다. detector_input.csv 파일은 시스템에
입력된 총 광 파워를 저장하며, 모든 효율 계산의 기준을 제공합니다.
detector_efficiency_0.csv 파일에는 detector efficiency가 포함되어 있으며, 이는
광학 시스템을 통해 전파된 후 detector plane에 도달한 incident optical power의 비율로 정의됩니다.
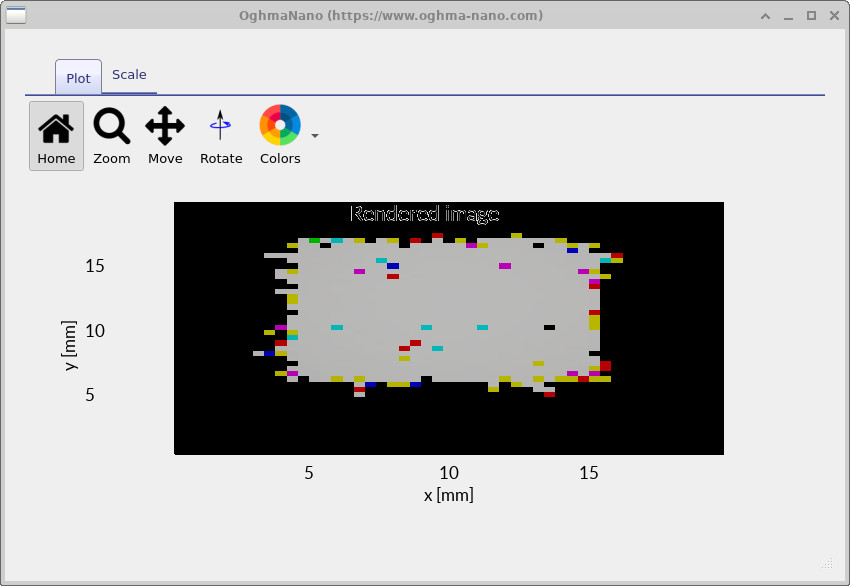
detector directory에는 이미지 plane에 도달한 빛을 시각화하는 두 가지 상보적인 방법이 포함되어 있습니다: 하나는 색 민감 detector(예: CCD/CMOS camera)가 “보게” 되는 것을 근사하는 단일 RGB rendering이고, 다른 하나는 detector intensity distribution을 파장의 함수로 검사할 수 있게 해주는 파장 분해 snapshot viewer입니다.
ray_image.csv 파일은 결합된 RGB detector image를 저장합니다. 내부적으로 이는
시뮬레이션이 생성한 전체 파장 의존적 광선 분포를 red,
green, blue 채널로 매핑하여 하나의 composite image를 형성함으로써 구성됩니다. 그 결과는
detector 위의 spot에 대한 직관적인 “camera-like” 보기로, 모든 파장을 하나의 컬러 이미지에 결합하며,
gross chromatic effects, vignetting, 및 전체 image placement를 빠르게 진단하는 데 유용합니다.
별도로, image directory는 detector illumination의 파장 분해 breakdown을 제공합니다.
image를 더블클릭하면 simulation snapshots viewer가 열립니다
(??).
이 viewer는 모든 것을 단일 RGB composite로 축약하는 대신,
시뮬레이션된 spectrum 전반에서 detector-plane intensity distribution이 어떻게 변하는지 검사하도록 설계되었습니다.
snapshots viewer에서 + 버튼을 사용해 data.csv를 파일 목록에 추가하십시오. 일단 로드되면,
메인 plot은 특정 파장(표시된 예에서는 460 nm)에서의 detector intensity를 보여주고,
plot 아래의 파장 slider를 사용하면 전체 전파 파장 범위를 단계적으로 이동하며
공간 분포가 어떻게 변화하는지 볼 수 있습니다. 실제로 이는 detector 이미지의 spectral “stack”을 제공하며:
시각적으로 매력적이지만 적분된 RGB rendering으로부터 chromatic blur, chromatic focal shift, 및
파장 의존적 vignetting을 직접 분리할 수 있는 방법입니다.
snapshots 시스템에 대한 보다 완전한 설명 — snapshot datasets가 디스크에 어떻게 정리되는지와 viewer controls 사용법을 포함 — 은 전용 페이지 Output snapshots를 참조하십시오.
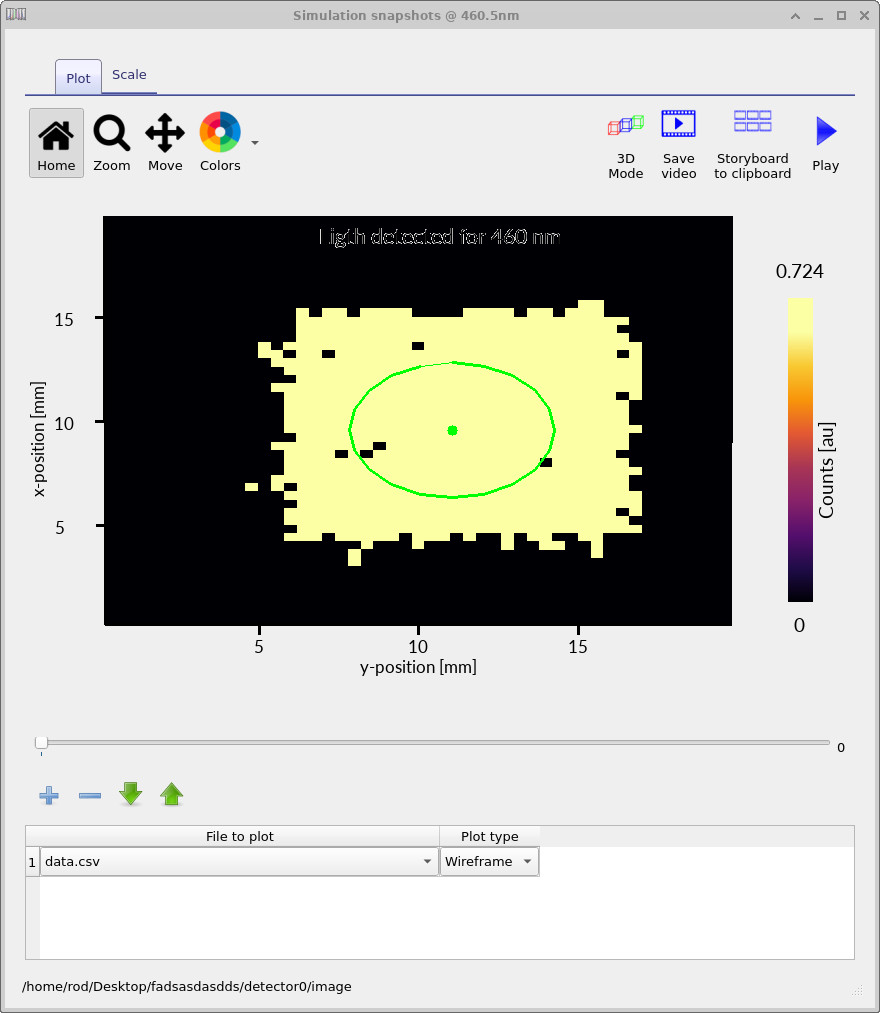
data.csv를 추가하면, plot은
파장 분해 detector intensity(여기서는 460 nm)를 보여줍니다. slider는 파장을 따라 이동하며
detector-plane intensity distribution의 chromatic variation을 검사합니다.
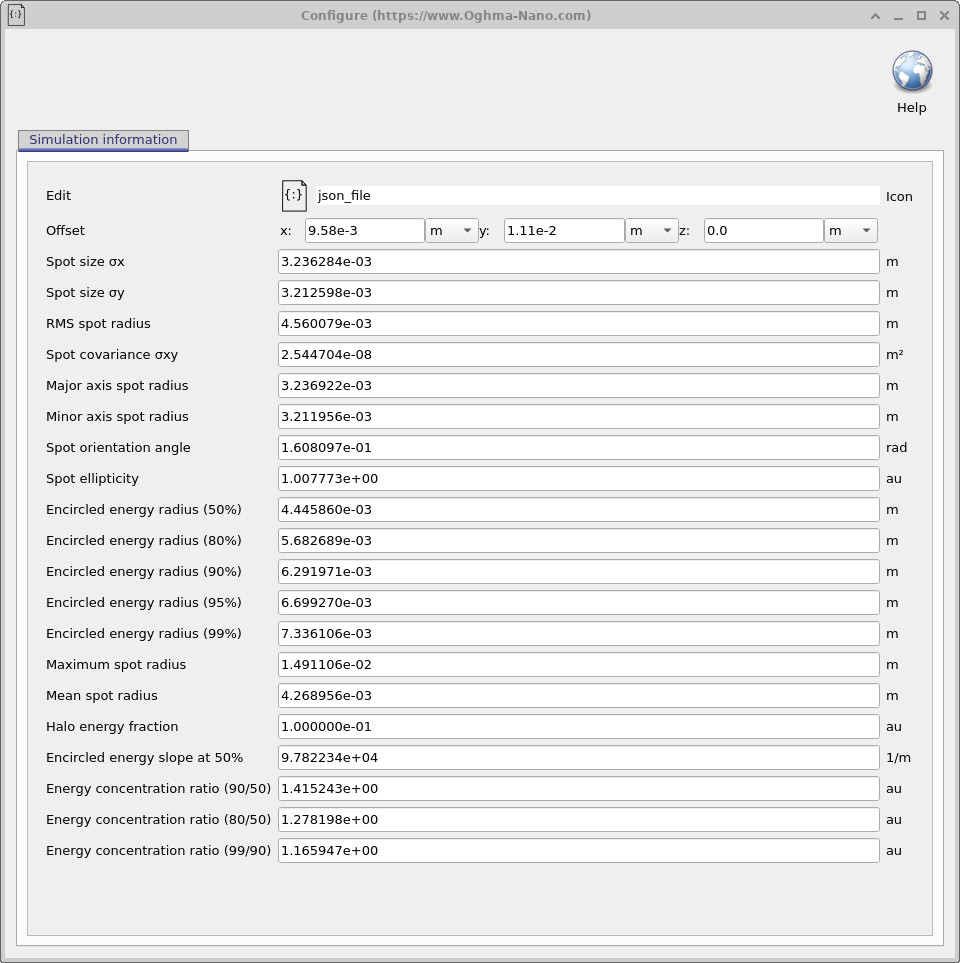
정량적 분석에 가장 중요한 출력은 stats.dat이며, 이는
??에
표시된 detector statistics window를 엽니다.
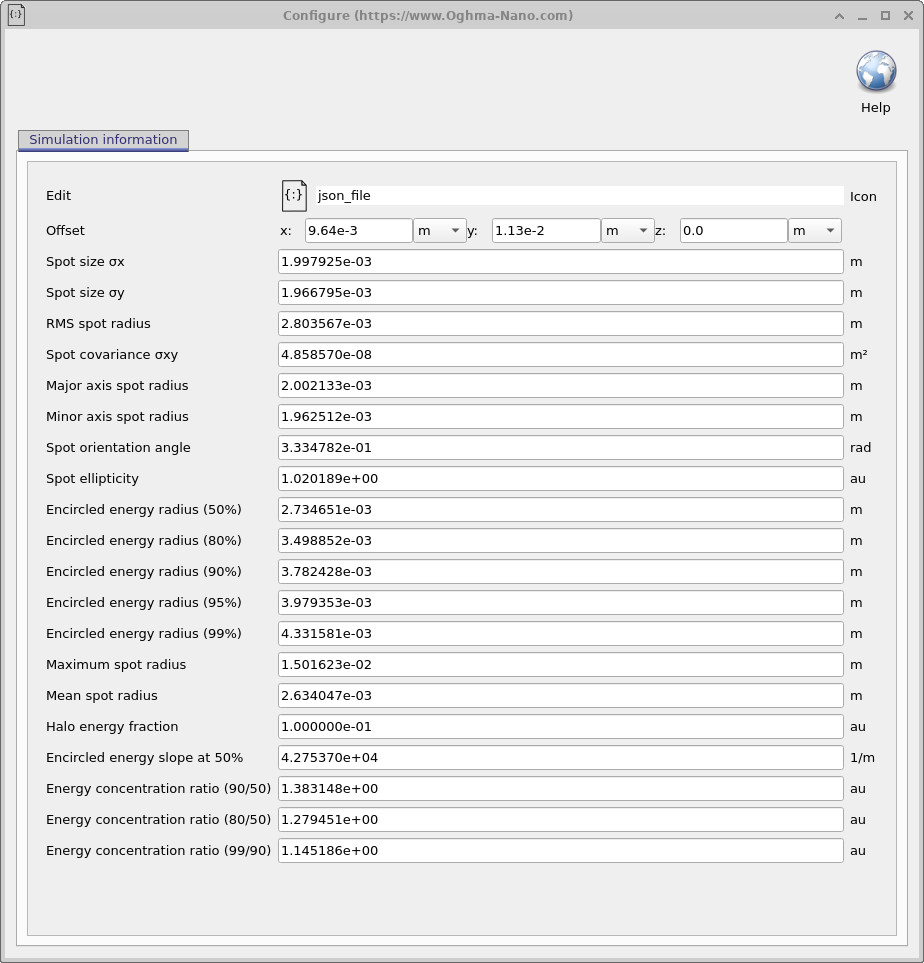
이 창은 detector plane 위의 광선 분포에서 도출된 모든 성능 지표를 나열합니다.
이러한 지표는 광학 설계를 비교하고,
파라미터를 최적화하며, 자동화된 scans를 수행하기 위한 객관적이고 재현 가능한 기반을 제공합니다.
| 지표 | 기호 / 정의 | 물리적 의미 및 해석 |
|---|---|---|
| Offset (x, y, z) | \((x_0, y_0, z_0)\) | nominal optical axis에 대한 detector plane의 공간적 offset입니다. 0이 아닌 offset은 misalignment, tilt 또는 비대칭 aberrations에 의한 image shift를 나타냅니다. 이러한 값은 decentration 및 field-dependent distortion을 진단하는 데 유용합니다. |
| Spot size σx | \(\sigma_x = \sqrt{\langle (x - \bar{x})^2 \rangle}\) | x축을 따른 광선 교차 위치의 표준편차입니다. 이는 수평 image blur를 정량화하며 coma 및 astigmatism과 같은 aberrations에 민감합니다. |
| Spot size σy | \(\sigma_y = \sqrt{\langle (y - \bar{y})^2 \rangle}\) | y축을 따른 광선 교차 위치의 표준편차입니다. σx와 함께 이는 spot shape의 anisotropy를 특성화합니다. |
| RMS spot radius | \(\sigma_{\text{RMS}} = \sqrt{\sigma_x^2 + \sigma_y^2}\) | 전체 image blur의 스칼라 측정값으로, 광학 설계에서 최적화 지표로 널리 사용됩니다. RMS spot radius가 작을수록 더 선명한 이미지를 의미합니다. |
| Spot covariance σxy | \(\langle (x-\bar{x})(y-\bar{y}) \rangle\) | x 및 y 편차 간의 상관관계를 측정합니다. 0이 아닌 값은 회전된 spot ellipse를 나타내며 astigmatism 또는 off-axis aberrations의 특징입니다. |
| Major axis spot radius | \(a\) | spot ellipse의 주 principal axis를 따른 RMS radius입니다. 이는 이미지에서 최대 blur 방향을 나타냅니다. |
| Minor axis spot radius | \(b\) | spot ellipse의 부 principal axis를 따른 RMS radius입니다. major axis와의 비교를 통해 spot elongation 정도를 알 수 있습니다. |
| Spot orientation angle | \(\theta\) | x축에 대한 RMS spot ellipse의 회전 각도입니다. 이 파라미터는 기울어진 aberrations 및 비대칭 광학 layout을 진단하는 데 유용합니다. |
| Spot ellipticity | \(a/b\) | major RMS axis와 minor RMS axis의 비율입니다. 1에 가까운 값은 원형의 잘 보정된 spot을 나타내며, 더 큰 값은 astigmatism 또는 coma를 나타냅니다. |
| Encircled energy radius (p%) | \(r_p\) | 전체 검출 광 에너지의 p %를 포함하는 반지름입니다. 일반적인 임계값(50%, 80%, 90%, 95%, 99%)은 에너지 concentration을 정량화하는 데 사용되며 detector pixel size와 image sharpness에 직접 관련됩니다. |
| Maximum spot radius | \(\max r\) | centroid에서 가장 멀리 검출된 광선까지의 거리입니다. 이는 image halo에 기여하는 극단적 outliers 및 stray rays를 강조합니다. |
| Mean spot radius | \(\langle r \rangle\) | centroid로부터 광선까지의 거리의 산술 평균입니다. 이는 outliers에 덜 민감한 RMS radius에 대한 상보적 측정값을 제공합니다. |
| Halo energy fraction | \(E_{\text{halo}} / E_{\text{total}}\) | core spot region 바깥에 존재하는 검출 에너지의 분율입니다. 높은 halo fraction은 scattering, aberrations 또는 vignetting을 나타냅니다. |
| Encircled energy slope (50%) | \(\left.\tfrac{dE}{dr}\right|_{50\%}\) | 50% 반지름에서의 encircled energy curve의 기울기입니다. 더 가파른 기울기는 더 선명한 image edges와 더 높은 contrast에 대응합니다. |
| Energy concentration ratio (90/50) | \(r_{90}/r_{50}\) | 에너지의 90%와 50%를 포함하는 반지름의 비율입니다. 더 작은 비율은 image centre 근처에 더 조밀한 에너지 concentration을 나타냅니다. |
| Energy concentration ratio (80/50) | \(r_{80}/r_{50}\) | 동일한 조명 조건에서 경쟁 광학 설계를 비교하는 데 흔히 사용되는 중간 범위 concentration metric입니다. |
| Energy concentration ratio (99/90) | \(r_{99}/r_{90}\) | 마지막 몇 퍼센트의 에너지가 halo로 얼마나 빠르게 퍼지는지를 정량화합니다. stray light 및 고차 aberrations에 민감합니다. |
함께 보면, 이러한 성능 지표는 detector plane에서의 시스템 광학 성능에 대한 완전한 정량적 설명을 제공합니다. 다음 절에서는 이러한 지표가 Cooke triplet 설계의 자동화된 파라미터 scans 및 최적화를 위한 objective functions로 사용됩니다.
🧪 분석:이 Cooke triplet의 경우, 성능 지표의 수치 값은 조밀하고 잘 거동하는 이미지를 나타냅니다. spot sizes σx ≈ 2.00 mm 및 σy ≈ 1.97 mm는 매우 유사하며, 이는 blur가 수평 및 수직 방향에서 거의 동일하고 이미지가 늘어난 형태라기보다 원형에 가깝다는 것을 의미합니다. 이는 1.02의 spot ellipticity에 의해 확인되며, 이는 1에 매우 가깝고 따라서 astigmatism이 약하다는 것을 나타냅니다. 2.80 mm의 RMS spot radius는 개별 축 spot sizes보다 약간만 크므로 중심에서 멀리 떨어진 광선 집단이 크지 않고 spot이 조밀한 core에 의해 지배된다는 것을 보여줍니다. encircled-energy radii는 2.73 mm (50%)에서 3.78 mm (90%) 및 4.33 mm (99%)까지 부드럽게 증가하며, 이는 대부분의 광 파워가 centroid 근처에 집중되고 소량만 외부 halo로 퍼진다는 것을 의미합니다. 이는 r90/r50 ≈ 1.38과 같은 energy concentration ratios에 의해 뒷받침되며, 이는 포획 에너지를 두 배로 늘리는 데 큰 반지름 증가가 필요하지 않음을 의미합니다. 0.10의 halo energy fraction은 검출된 빛의 약 10%가 main spot 바깥에 있음을 보여주며, 심각한 scattering 또는 misalignment보다는 완만한 고차 aberrations와 일치합니다. 전반적으로 이러한 값은 설계점 근처에서 동작하는 잘 정렬된 Cooke triplet에 전형적이며, 거의 원형이고 조밀하게 집중된 이미지와 제한된 stray light를 생성합니다.
5. 첫 번째 렌즈 요소 수정 및 beam quality에 대한 영향 관찰
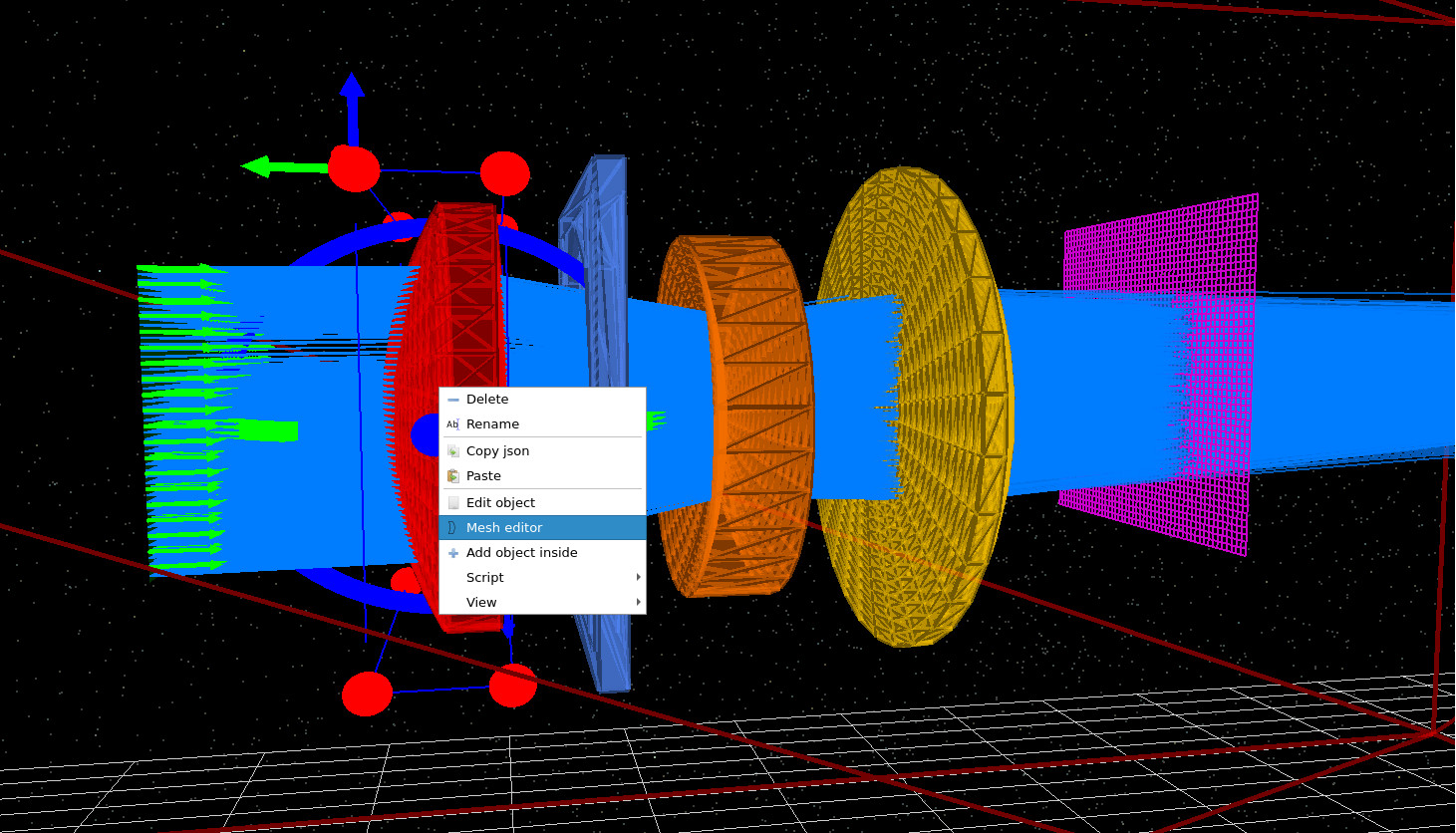
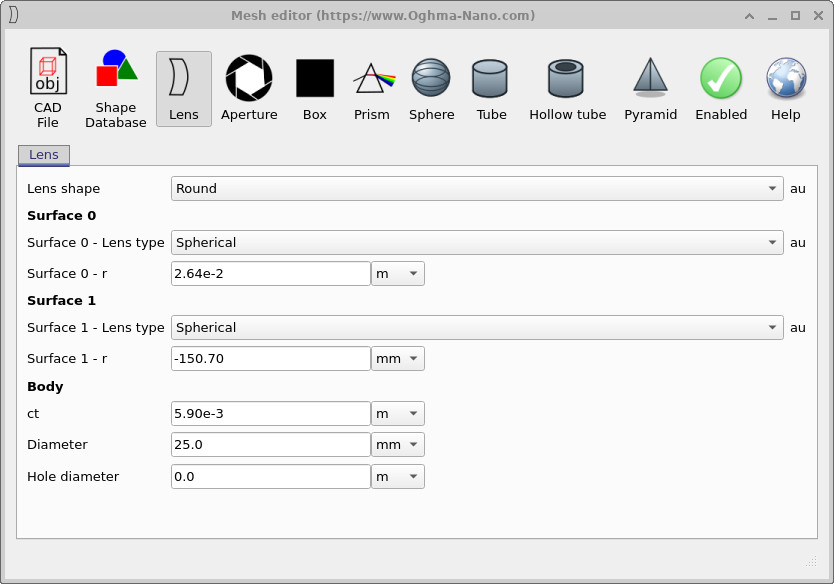
이 단계에서는 첫 번째 렌즈 요소의 mesh parameters를 편집하여 광학 시스템의 geometry를 직접 수정합니다. 이를 위해 3D 보기에서 Cooke triplet의 첫 번째 요소를 right-click한 후 Mesh editor를 선택합니다 (??). 그러면 선택한 object에 대한 mesh editor가 열리며, 여기서 렌즈의 실제 형상은 surface curvatures, thickness, 및 diameter의 관점에서 명시적으로 정의됩니다.
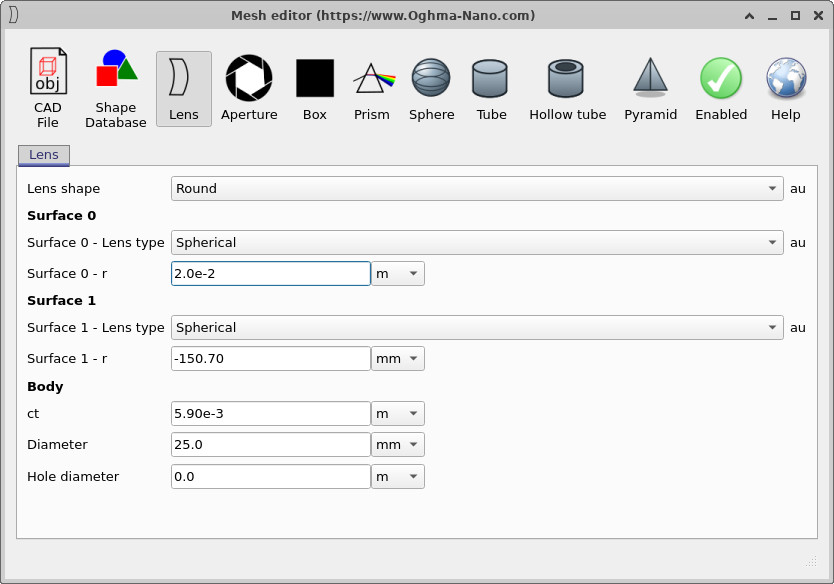
첫 번째 렌즈 요소의 전면 surface는 editor에서 Surface 0으로 표시됩니다 (??). 처음에는 곡률 반지름이 2.64 × 10−2 m로 설정되어 있습니다. 이 값을 2.0 × 10−2 m로 줄이면 (??) surface의 curvature가 증가하여 렌즈가 더 강하게 수렴하게 됩니다. 이 파라미터는 S-plane editor를 통해서도 바꿀 수 있지만, 개별 surface의 물리적 효과를 탐색할 때는 직접 여기에서 조정하는 것이 더 빠른 경우가 많습니다.
curvature를 업데이트한 후 시뮬레이션을 다시 실행합니다 (??). 시각적으로 첫 번째 요소에서 나온 ray bundle은 이제 더 강하게 수렴하며, 그 결과 나머지 광학 시스템을 통과하여 detector plane에 도달하는 동안 더 조밀한 beam을 형성합니다. beam shape의 이 변화는 ray-trace 보기에서는 미묘하지만, 그 효과는 detector statistics에 정량적으로 포착됩니다.
업데이트된 성능 지표 (??) 는 이전 configuration과 비교하여 spot size가 분명히 감소했음을 보여줍니다. σx 와 σy 모두 감소하며, 이는 beam이 두 개의 transverse directions 모두에서 더 강하게 집속되었음을 나타냅니다. RMS spot radius도 그에 따라 더 작아져, 개선이 단일 축에만 국한되지 않고 이미지 전체의 sharpening을 반영함을 확인해 줍니다. encircled-energy radii는 모든 에너지 임계값에서 축소되며, 이는 검출된 파워의 더 큰 분율이 이제 centroid에 더 가깝게 집중됨을 의미합니다.
동시에, spot ellipticity는 1에 가깝게 유지되고 covariance는 작게 유지되며, 이는 집속 강도의 증가가 유의미한 비대칭이나 astigmatism을 도입하지 않았음을 보여줍니다. 물리적으로 이 단순한 curvature 조정은 Cooke triplet에서 aberrations의 전체 균형을 악화시키지 않고 beam의 수렴을 개선합니다. 이 예는 개별 광학 surface에 대한 작고 국소적인 변화가 detector-plane 성능의 측정 가능한 개선으로 직접 이어지는 방식과, 광학 설계를 다듬을 때 성능 지표가 신뢰할 수 있는 정량적 가이드를 제공하는 이유를 보여줍니다.
6. 요약
이 튜토리얼에서는 광선 추적의 정성적 검사에서 출발하여 재현 가능한 성능 지표(FoM)를 사용한 광학 성능의 정량적 평가로 이동했습니다. Cooke triplet에서 시작하여, detector-plane statistics가 시각적 ray plots를 넘어서는 객관적인 image quality 설명을 제공함을 보여주었습니다.
S-plane 및 빠른 optimisation workflow를 사용하여,
detector offset,
spot sizes σx/σy, RMS spot radius, spot covariance, ellipse
parameters, encircled energy radii (EE50–EE99), halo energy fraction, encircled-energy
slope, 및 energy concentration ratios와 같은 지표를 사용해 optimizer_output.csv를 통해
설계 variants를 생성하고 순위화했습니다. 또한 이러한 수치 지표를
detector images, RGB composites, 및 파장 분해 snapshots와 연관지어 chromatic
blur, energy concentration, 및 stray-light behaviour를 드러냈습니다.
마지막으로 렌즈 geometry를 직접 수정하고 결과 성능 지표를 재평가함으로써, 핵심 분석 루프를 보여주었습니다: 물리적 파라미터를 변경하고, 시뮬레이션을 다시 실행하고, FoM을 비교하고, detector 및 3D views에서 결과를 검증하는 것. 이 지표 기반 workflow는 단순한 렌즈 시스템에서 복잡한 광학 설계로 자연스럽게 확장되며, OghmaNano에서 optimisation 및 tolerance-style analysis를 위한 견고한 기반을 제공합니다.
💡 다음 단계: 이 FoM 튜토리얼 이후에는 Optical detectors, Light sources, 또는 microlens and optical filtering demo와 같은 관련 광학 페이지를 살펴보며 detector configuration, sampling, 및 system geometry가 동일한 성능 지표에 어떤 영향을 주는지 확인해 볼 수 있습니다.