性能指標 (パート A): OghmaNano におけるレイトレース光学性能の評価
1. イントロダクション
レイトレーシングは、大量の視覚的出力—レイ束、検出器画像、3D 形状—を生成できますが、 「見た目が良い」ことは設計基準ではありません。 このチュートリアルでは、性能指標 (FoM) に焦点を当てます。これは、検出器画像 およびレイトレース統計を、比較、順位付け、解釈が可能な明確に定義された数値へ圧縮する定量指標です。
このチュートリアルでは、これらの性能指標が 個々の光学系に対してどのように生成され、物理的に何を表すのかを調べます。 スポットサイズ (σx, σy)、 RMS スポット半径、主軸および副軸スポット半径、 スポット楕円率およびスポット方位角、 包囲エネルギー半径 (EE50, EE80, EE90, EE95, EE99)、 ハローエネルギー分率、およびエネルギー集中比を含む 一般的な指標を抽出して解釈します。 重点は、各指標がどのように構成され、いつ有用であり、 光学性能のどの側面を捉え—あるいは隠してしまう—のかを理解することにあります。
これらの性能指標が単一設計レベルで理解されると、それらを系統的に適用できます。 同じ指標は、OghmaNano の パラメータスキャンツール によって設計空間全体にわたる光学性能追跡や最適化駆動に直接用いられます。 したがって、このチュートリアルは光学性能評価の概念的基盤を確立し、 付随するスキャンチュートリアルでは、これらの性能指標を大規模に適用する方法を示します。
cting2. Cooke triplet のサンプルを開く
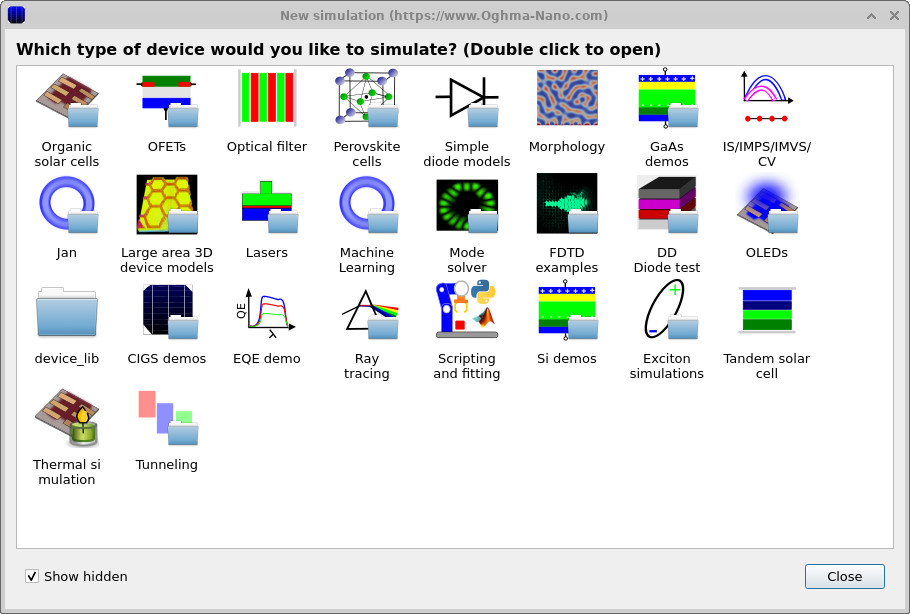
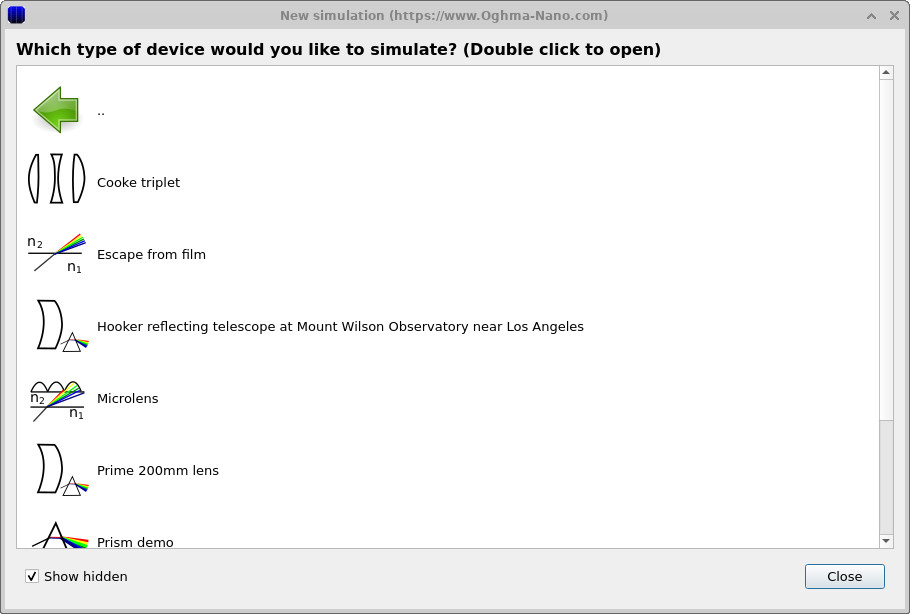
まずは、光学モデルを一から構築するのではなく、 性能指標の評価に集中できるように、あらかじめ設定されたレイトレーシングサンプルから開始します。 Windows のスタートメニューから OghmaNano を起動してください。メインウィンドウで New simulation ボタンをクリックして、シミュレーションライブラリを開きます。これは Figures 2a–b に示されています。
デバイスカテゴリ一覧から、Ray tracing をダブルクリックして S-plane 光学デモを開きます。この一覧から、明示的に Cooke triplet サンプルを選択して開いてください。 この古典的な多枚構成レンズは、意図的に完全ではないものの挙動が良好な光学系を提供するため、 さまざまな性能指標が光学設計の変化にどう応答するかを示すのに理想的です。
💡 ヒント: シミュレーションは
C:\ のようなローカルドライブに保存してください。FoM に集中する場合でも、スキャンやオプティマイザは依然として CSV 出力や(必要に応じて)レイ/メッシュファイルを生成します。
ネットワーク、USB、またはクラウド同期フォルダでは I/O が律速になり、
大幅に遅くなることがあります。
3. 光学系を確認し、性能指標がどこから生じるかを把握する
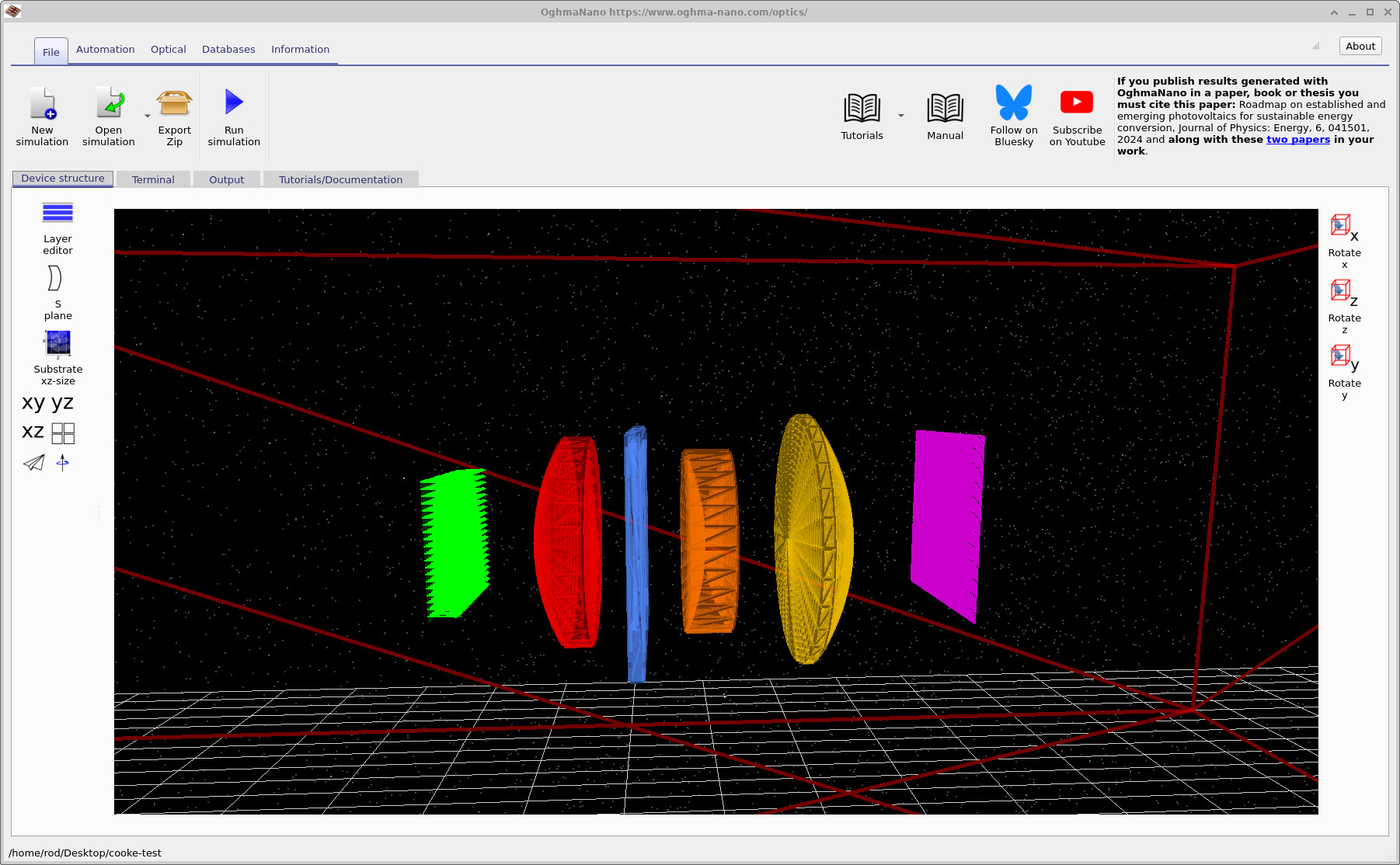
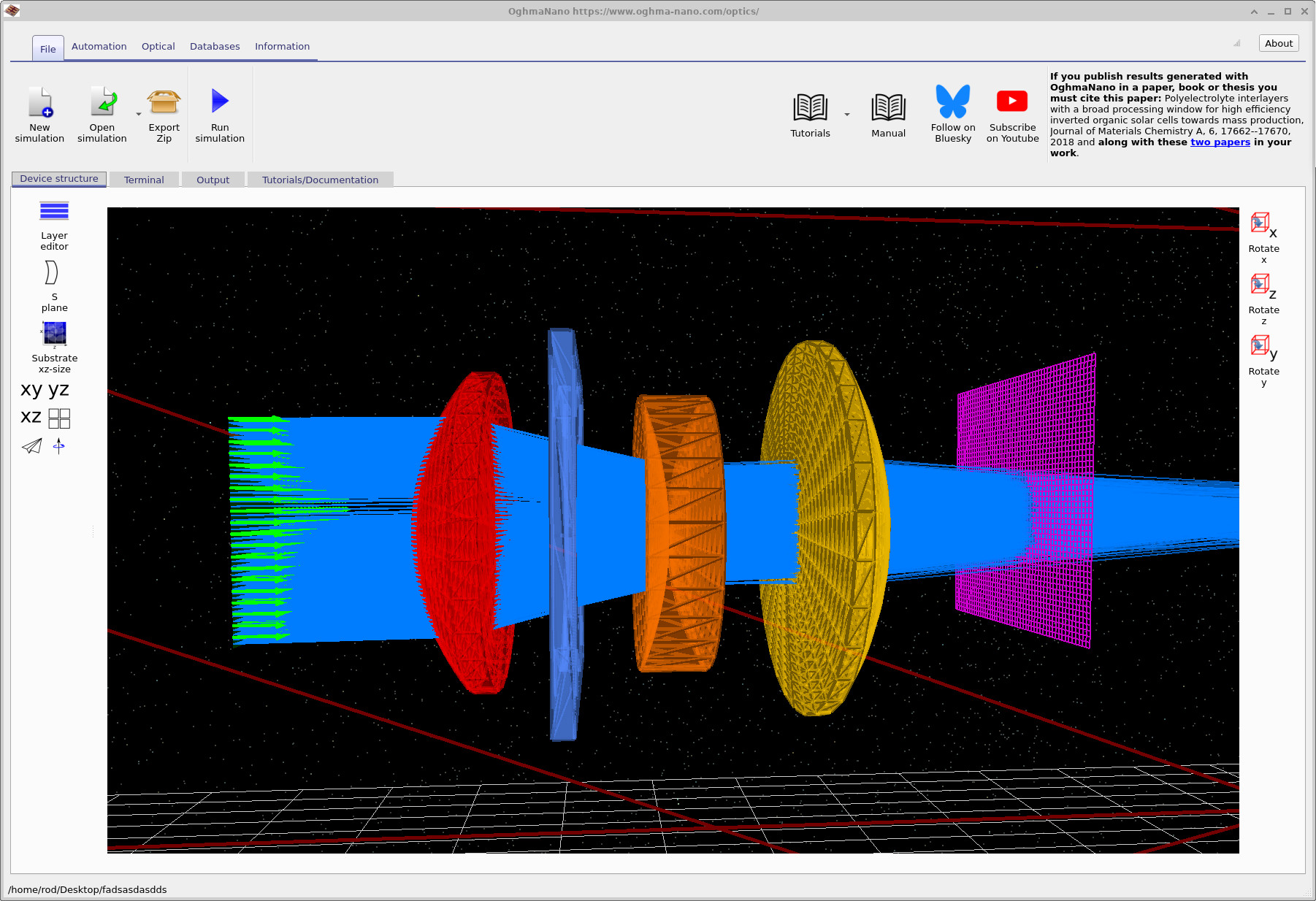
サンプルを開いた後、メインウィンドウは ?? のように見えるはずです。 3D ビューには、光源から検出器までの完全な光学系が表示されます。 左から右へ、緑の矢印は光源から放出された入射光線を示します。 これらの光線はまず赤色の光学要素に到達し、これが系の第 1 レンズです。 その後に続く薄い青色の要素は開口絞りであり、数値開口を制限して、 系を通過できる光線を制御します。
開口の下流で、光線は第 2 レンズ(オレンジ)を通り、 次に第 3 レンズ(黄色)を通過します。これら 3 つの屈折要素が一体となって、 古典的な Cooke triplet を形成します。これは 19 世紀後半に開発された歴史的に重要な 3 枚構成レンズ設計であり、 単純な球面と一般的な光学ガラスのみを用いて球面収差、コマ収差、非点収差を補正できることで 高く評価されています。 Cooke triplet の派生形は現在でも、 多くの写真用および撮像用レンズの概念的基礎として広く利用されています。
最後に、光線は紫色のグリッドで示された検出器面に到達します。 すべての性能指標は最終的にこの面上の光線分布から導かれます。 光線交点の空間パターンは、 重心、スポット半径、標準偏差、包囲エネルギー曲線、および関連する 光学性能尺度などの定量指標へと縮約されます。
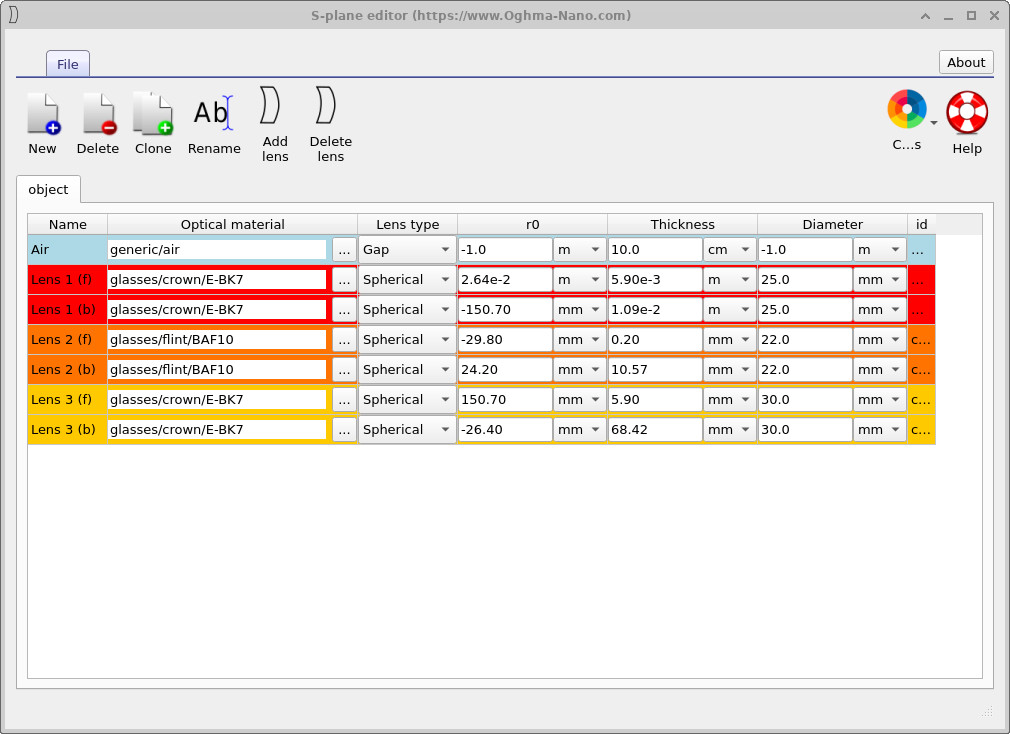
同じ光学系は S-plane editor によってパラメトリックに表現されており、 これは左側ツールバーの S-plane ボタンをクリックすることで開けます。これは ?? に示されています。 S-plane テーブル内の各行は、3D ビュー内の 1 つの物理面に直接対応しており、 3 枚のレンズ要素と開口絞りも含まれます。 このチュートリアルでは、これらのパラメータを変更する必要はありません。その役割は、 どの量が系の幾何形状を定義し、後で自動スキャンを実行する際にどのパラメータが変化されるのかを 明確にすることにあります。
Cooke triplet 自体のより詳細な説明—光学レイアウト、 設計思想、および歴史的背景を含む—については、専用チュートリアル Cooke Triplet Tutorial (Part A) を参照してください。
4. シミュレーション出力と検出器性能指標の確認
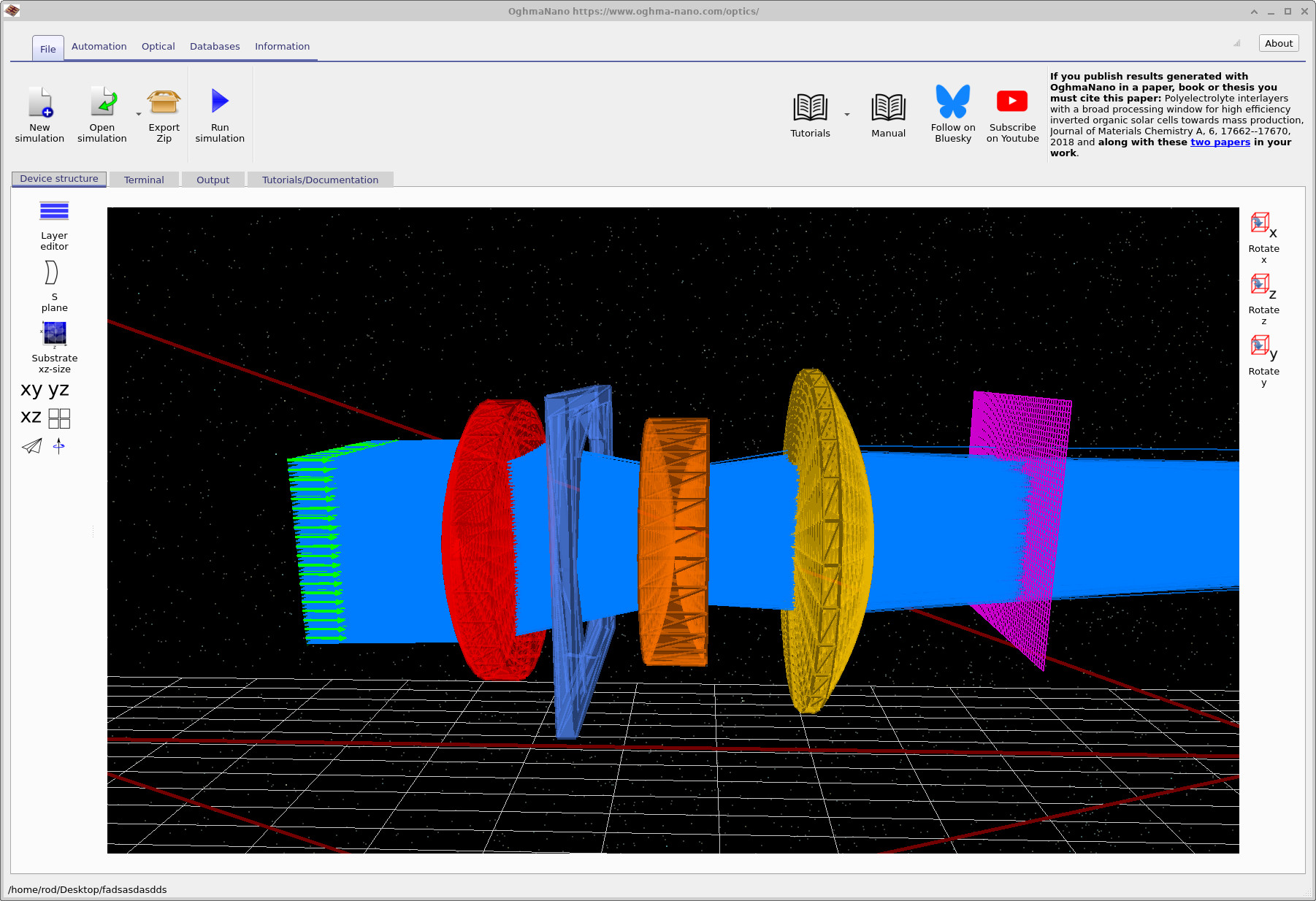
シミュレーション実行後、系が妥当に動作していることを最初に確認する手段は、 レイトレース自体を調べることです (??)。 ここでは、光源から放出された光線が Cooke triplet の 3 つの屈折要素を通過し、 開口絞りによって空間的にフィルタされ、最後に 検出器面に到達する様子が示されています。この表示は主として定性的です。つまり、 光線が意図せずクリップされたり破局的に発散したりしていないこと、 光軸、要素順序、開口配置が期待通りであることを確認するために用います。
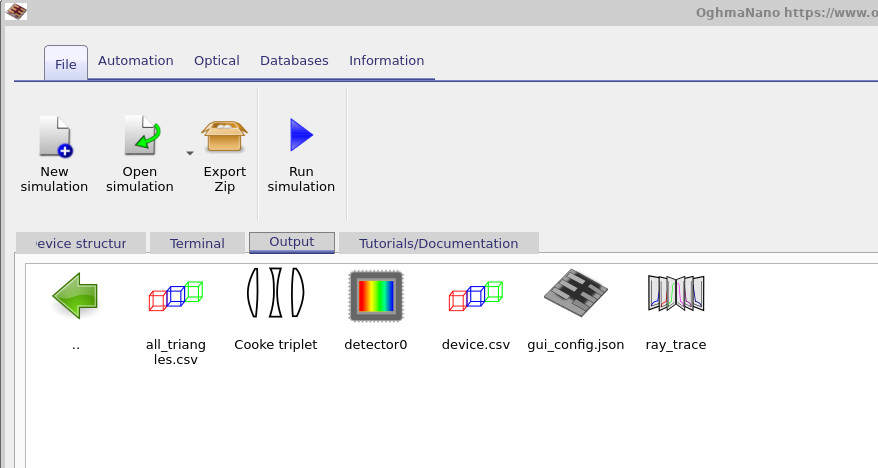
定量解析は Output タブ
(??)から始まります。
ここにはレイトレーシングエンジンが生成したすべてのファイルが含まれています。device.csv
はレンズ面や検出器面を含む光学シーン全体の幾何記述を格納しています。
all_triangles.csv は、
レイ–面交差判定に内部的に使用される三角形分割メッシュを含んでいます。
このファイルを可視化することで、理想化された解析曲面ではなく、実際の計算形状を
確認できます。
ray_trace フォルダは、系内の個々の光線経路の詳細表現を提供し、
収差、ビネッティング、あるいは予期しない光線損失の診断に有用です。
ただし、性能解析において最も重要なフォルダは detector0 です。
このフォルダをダブルクリックすると、
?? に示す検出器出力ディレクトリが開きます。
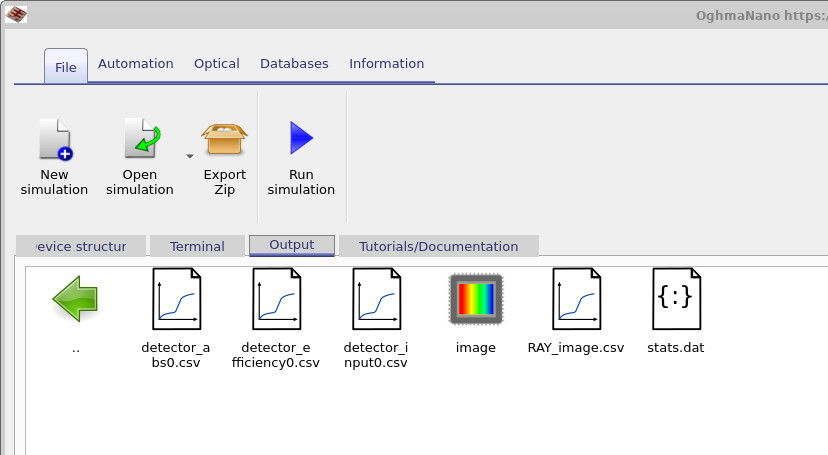
検出器ディレクトリ内で、detector_abs_0.csv は
検出器表面で吸収された光パワーの空間分布を記録します。
detector_input.csv は、系へ投入された総光パワーを保存しており、
すべての効率が計算される基準値を与えます。
detector_efficiency_0.csv は検出器効率を含み、これは
光学系を伝搬した後に検出器面へ到達する入射光パワーの割合として定義されます。
検出器ディレクトリには、像面に到達する光を可視化するための相補的な 2 つの方法があります: 単一の RGB レンダリングと、波長の関数として検出器強度分布を調べることができる 波長分解スナップショットビューアです。
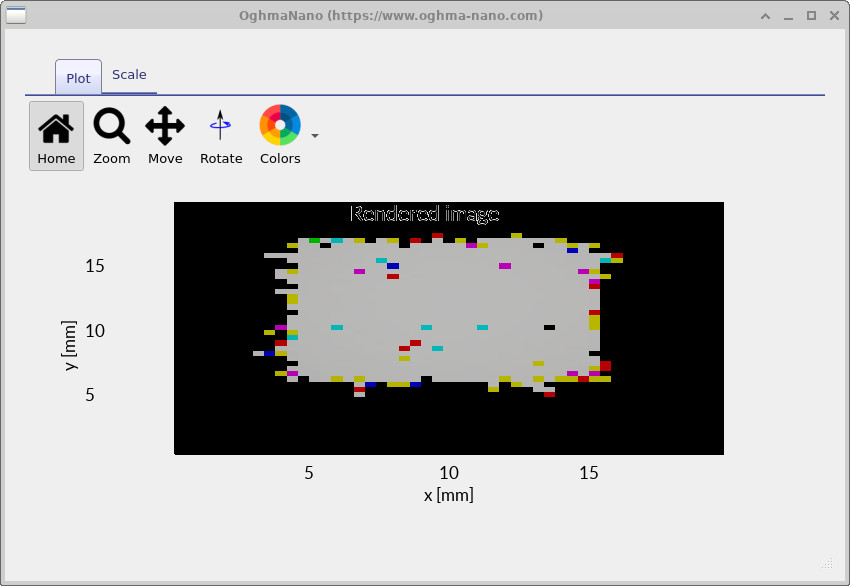
ray_image.csv は結合された RGB 検出器画像を保存します。内部的には、
これはシミュレーションで生成された完全な波長依存光線分布を
赤・緑・青チャンネルへ写像して単一の合成画像を形成することで構成されます。結果として、
これは色感度を持つ検出器(たとえば CCD/CMOS カメラ)が「見る」ものに近い直感的な
「カメラ風」表示を与え、色収差、ビネッティング、および全体的な像位置を
迅速に診断するのに有用です。
一方、image ディレクトリは検出器照明の波長分解内訳を提供します。
image をダブルクリックすると、シミュレーション snapshots viewer が開きます
(??)。
このビューアは、すべてを単一の RGB 合成へまとめるのではなく、
シミュレーションしたスペクトル全体にわたって検出器面強度分布がどのように変化するかを
確認するために設計されています。
snapshots viewer では、+ ボタンを使って data.csv をファイル一覧へ追加します。読み込み後、
メインプロットには特定波長(示した例では 460 nm)における検出器強度が表示され、
プロット下の波長スライダによって伝搬波長範囲全体を順にたどりながら、
空間分布がどのように変化するかを確認できます。これは実質的に検出器画像のスペクトル「スタック」を提供し、
視覚的に魅力的ではあるものの積分された RGB レンダリングからは分離できない
色収差ぼけ、色収差焦点シフト、および波長依存ビネッティングを直接調べる手段となります。
snapshots システムのより詳細な説明—ディスク上での snapshot データセットの構成や、 viewer コントロールの使用方法を含む—については、専用ページ Output snapshots を参照してください。
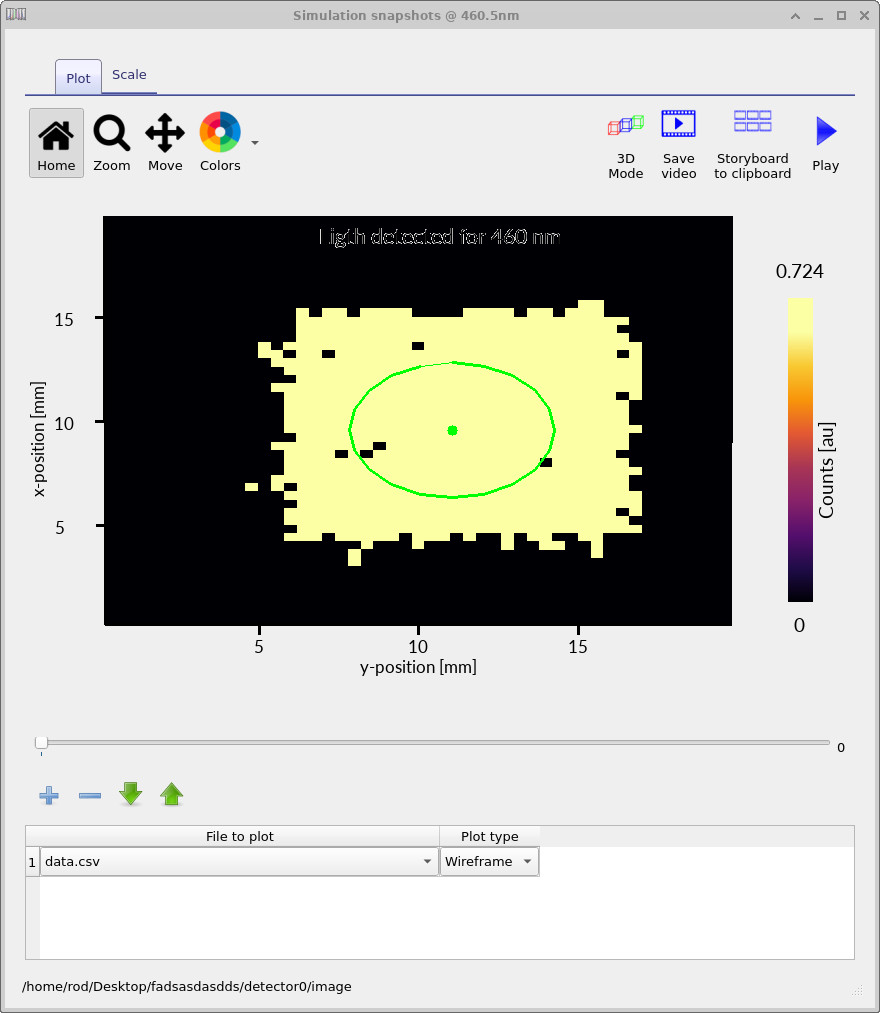
data.csv を追加すると、プロットには
波長分解検出器強度(ここでは 460 nm)が表示されます。スライダで波長を切り替えることで、
検出器面強度分布の色依存変化を確認できます。
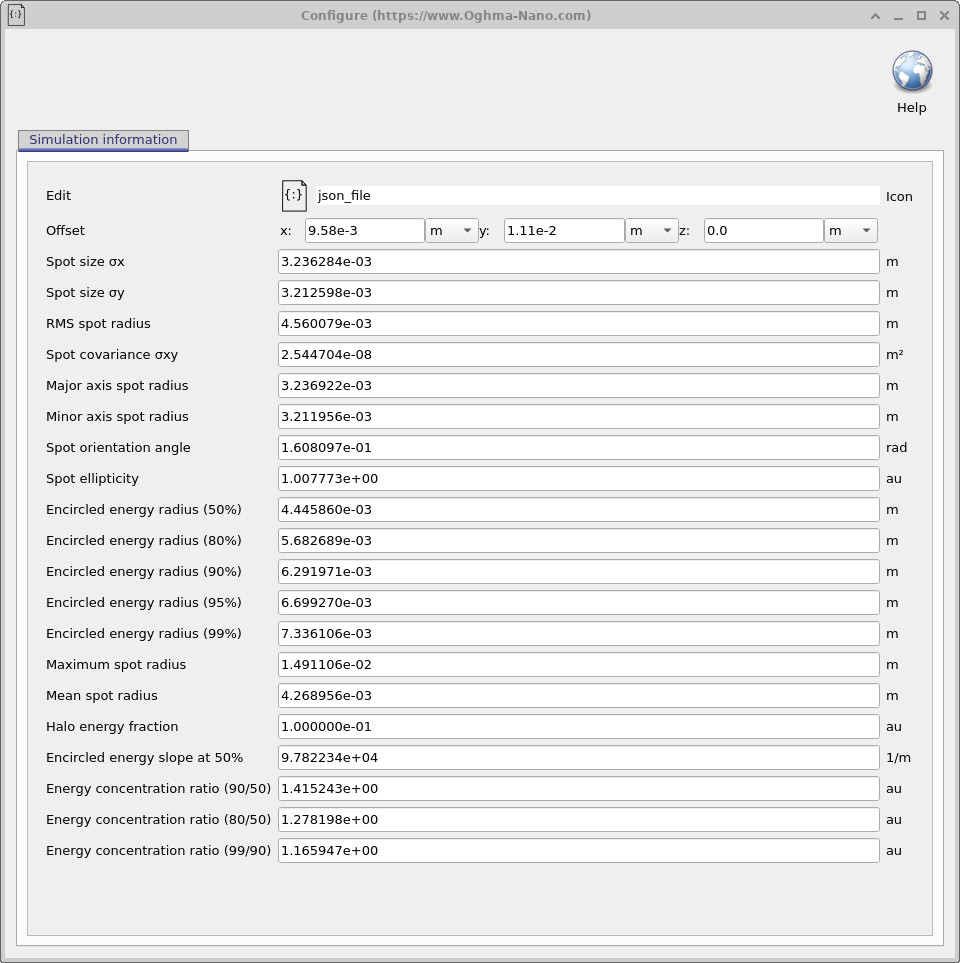
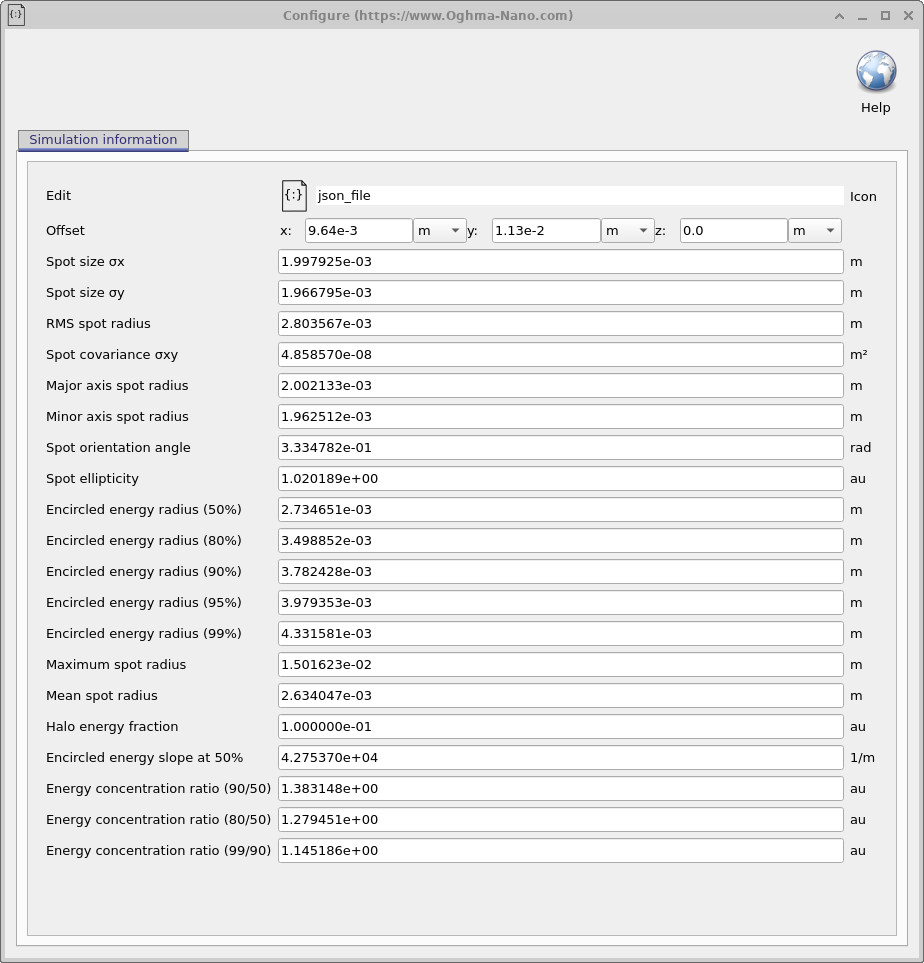
定量解析にとって最も重要な出力は stats.dat であり、これを開くと
?? に示す
検出器統計ウィンドウが表示されます。
このウィンドウには、検出器面上の光線分布から導出されたすべての性能指標が一覧表示されます。
これらの指標は、光学設計の比較、
パラメータ最適化、および自動スキャンを行うための客観的で再現可能な基盤を提供します。
| 指標 | 記号 / 定義 | 物理的意味と解釈 |
|---|---|---|
| オフセット (x, y, z) | \((x_0, y_0, z_0)\) | 公称光軸に対する検出器面の空間オフセット。 非ゼロのオフセットは、位置ずれ、傾き、または非対称収差による像シフトを示します。 これらの値は偏心や視野依存歪曲の診断に有用です。 |
| スポットサイズ σx | \(\sigma_x = \sqrt{\langle (x - \bar{x})^2 \rangle}\) | x 軸方向における光線交差位置の標準偏差。 これは水平方向の像ぼけを定量化し、コマ収差や非点収差などの収差に敏感です。 |
| スポットサイズ σy | \(\sigma_y = \sqrt{\langle (y - \bar{y})^2 \rangle}\) | y 軸方向における光線交差位置の標準偏差。 σx と合わせて、スポット形状の異方性を特徴付けます。 |
| RMS スポット半径 | \(\sigma_{\text{RMS}} = \sqrt{\sigma_x^2 + \sigma_y^2}\) | 全体的な像ぼけのスカラー尺度であり、光学設計において 最適化指標として広く用いられます。RMS スポット半径が小さいほど像はシャープです。 |
| スポット共分散 σxy | \(\langle (x-\bar{x})(y-\bar{y}) \rangle\) | x と y の偏差間の相関を測ります。 非ゼロ値は回転したスポット楕円を示し、非点収差 やオフアクシス収差に特徴的です。 |
| 主軸スポット半径 | \(a\) | スポット楕円の主主軸に沿った RMS 半径。 これは像における最大ぼけ方向を表します。 |
| 副軸スポット半径 | \(b\) | スポット楕円の副主軸に沿った RMS 半径。 主軸との比較によりスポット伸長の程度が分かります。 |
| スポット方位角 | \(\theta\) | x 軸に対する RMS スポット楕円の回転角。 このパラメータは傾いた収差や非対称光学レイアウトの診断に有用です。 |
| スポット楕円率 | \(a/b\) | RMS 主軸と副軸の比。 1 に近い値は円形で良好に補正されたスポットを示し、 より大きな値は非点収差やコマ収差を示します。 |
| 包囲エネルギー半径 (p%) | \(r_p\) | 総検出光エネルギーの p % を含む半径。 一般的なしきい値(50%、80%、90%、95%、99%)はエネルギー集中度を定量化し、 検出器ピクセルサイズや像のシャープネスと直接関係します。 |
| 最大スポット半径 | \(\max r\) | 重心から最も遠い検出光線までの距離。 これは像ハローに寄与する極端な外れ値や迷光光線を強調します。 |
| 平均スポット半径 | \(\langle r \rangle\) | 重心からの光線距離の算術平均。 これは RMS 半径を補完する尺度であり、外れ値への感度がより低いです。 |
| ハローエネルギー分率 | \(E_{\text{halo}} / E_{\text{total}}\) | 主スポット領域外にある検出エネルギーの割合。 ハロー分率の上昇は散乱、収差、またはビネッティングを示します。 |
| 包囲エネルギー勾配 (50%) | \(\left.\tfrac{dE}{dr}\right|_{50\%}\) | 50% 半径における包囲エネルギー曲線の勾配。 より急な勾配は、よりシャープな像エッジと高いコントラストに対応します。 |
| エネルギー集中比 (90/50) | \(r_{90}/r_{50}\) | エネルギーの 90% と 50% を含む半径の比。 より小さい比は、像中心近傍へのより強いエネルギー集中を示します。 |
| エネルギー集中比 (80/50) | \(r_{80}/r_{50}\) | 同一照明条件下で競合する光学設計を比較する際によく用いられる 中間域の集中指標です。 |
| エネルギー集中比 (99/90) | \(r_{99}/r_{90}\) | 最後の数 % のエネルギーがどれだけ急速にハローへ広がるかを定量化します。 迷光や高次収差に敏感です。 |
これらの性能指標を総合すると、検出器面における系の光学性能を完全に定量記述できます。 次のセクションでは、これらの指標を Cooke triplet 設計の自動パラメータスキャンおよび最適化の目的関数として用います。
🧪 解析:この Cooke triplet では、性能指標の数値はコンパクトで良好に振る舞う像を示しています。 スポットサイズ σx ≈ 2.00 mm および σy ≈ 1.97 mm は非常に近く、これはぼけが水平方向と垂直方向でほぼ同じであり、像が引き伸ばされているというよりほぼ円形であることを意味します。これは 1.02 というスポット楕円率によって確認され、1 に非常に近いため非点収差がごく弱いことを示しています。RMS スポット半径 2.80 mm は個々の軸スポットサイズよりわずかに大きいだけであり、中心から大きく外れた光線群が存在せず、スポットがコンパクトなコアに支配されていることを示しています。包囲エネルギー半径は 2.73 mm (50%) から 3.78 mm (90%)、4.33 mm (99%) へ滑らかに増加しており、これは光パワーの大部分が重心近傍に集中し、外側のハローへ広がるのはごく一部であることを意味します。これはエネルギー集中比、たとえば r90/r50 ≈ 1.38 によっても裏付けられ、捕集エネルギーを 2 倍にするために半径を大きく増やす必要がないことを示しています。0.10 のハローエネルギー分率は、検出された光の約 10% が主スポット外にあることを示しており、深刻な散乱や位置ずれではなく、中程度の高次収差と整合的です。全体として、これらの値は設計点近傍で動作する、良好にアラインされた Cooke triplet に典型的であり、ほぼ円形で強く集中した像と限られた迷光を生み出しています。
5. 第 1 レンズ要素を変更し、ビーム品質への影響を観察する
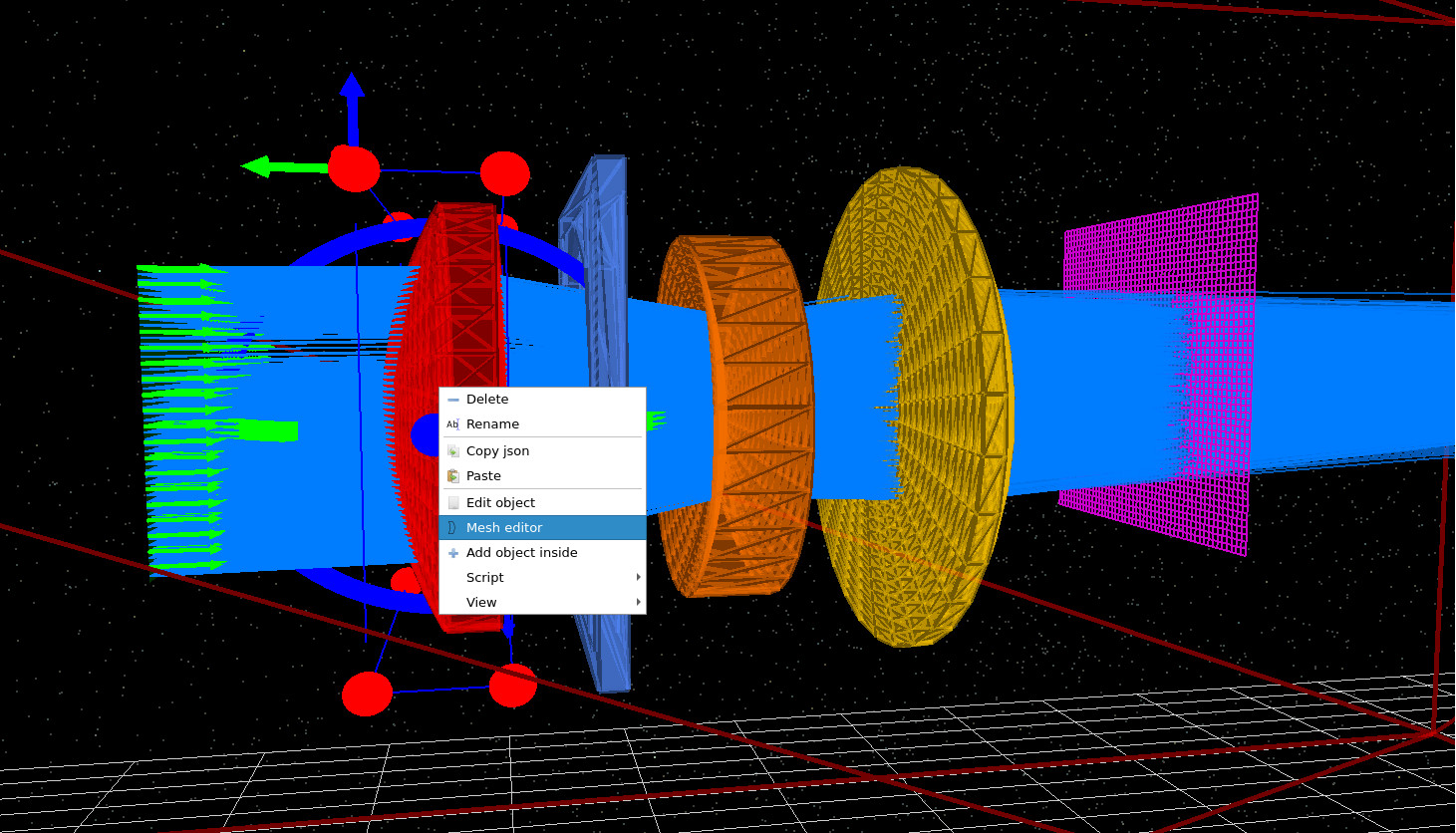
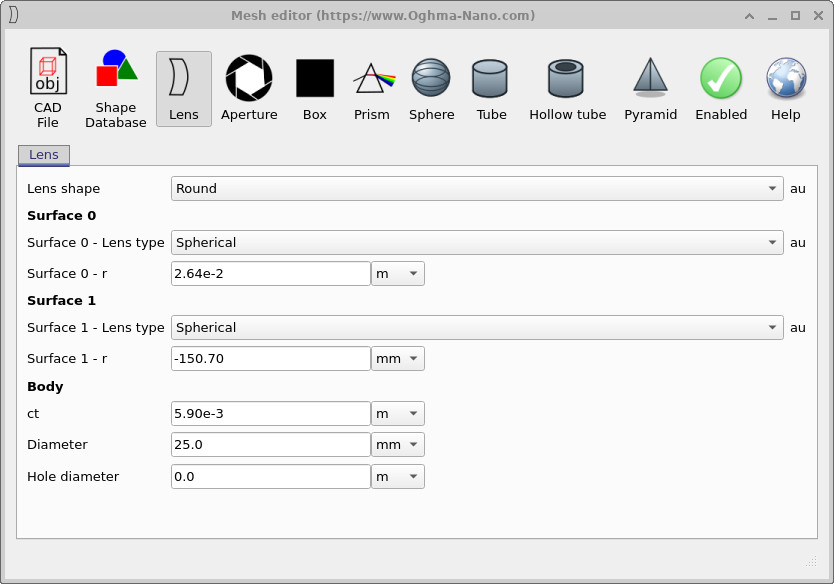
このステップでは、光学系の幾何形状を第 1 レンズ要素の mesh パラメータを編集することで直接変更します。これを行うには、 3D ビューで Cooke triplet の第 1 要素を右クリックし、Mesh editor を選択します (??)。 これにより選択オブジェクトの mesh editor が開き、そこでレンズの物理形状が 表面曲率、厚さ、直径という形で明示的に定義されています。
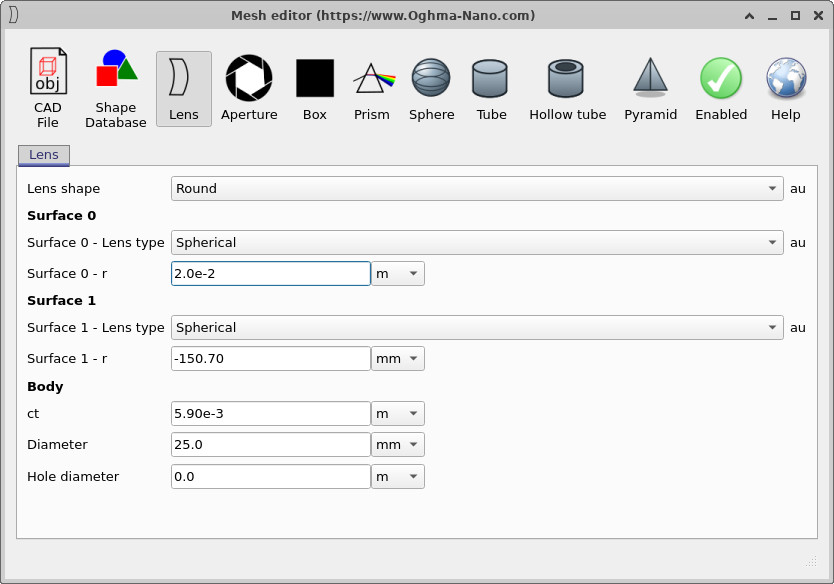
第 1 レンズ要素の前面は editor 内で Surface 0 と表示されています (??)。 初期状態では、その曲率半径は 2.64 × 10−2 m に設定されています。 この値を 2.0 × 10−2 m に減少させると (??)、 表面曲率が大きくなり、レンズはより強い集光性を持つようになります。 このパラメータは S-plane editor から変更することもできますが、個々の面の物理的効果を調べる際には、 ここで直接調整する方がしばしば迅速です。
曲率更新後、シミュレーションを再実行します (??)。 視覚的には、第 1 要素を出た後のレイ束はより強く収束するようになり、 光学系の残りを通過して検出器面へ向かう間に、より引き締まったビームとなります。 このビーム形状の変化はレイトレース表示では微妙ですが、その効果は 検出器統計において定量的に捉えられます。
更新後の性能指標 (??) は、前の構成と比べてスポットサイズが明確に減少したことを示しています。σx と σy の両方が減少しており、ビームが両方の 横方向でより強く集光されたことを示します。RMS スポット半径もそれに応じて小さくなっており、 改善が一軸に限られず、像全体のシャープ化を反映していることを確認できます。 包囲エネルギー半径はすべてのエネルギーしきい値で縮小しており、検出されたパワーのより大きな割合が 重心近傍に集中していることを意味します。
同時に、スポット楕円率は 1 に近いままであり、共分散も小さいままであるため、 集光力の増加が有意な非対称性や 非点収差を導入していないことが分かります。物理的には、この単純な曲率調整は、 Cooke triplet 全体の収差バランスを損なうことなく ビームの収束を改善します。この例は、個々の光学面への局所的な小さな変更が、 検出器面性能の測定可能な改善へ直接つながること、 そして光学設計を洗練する際に性能指標が信頼できる定量ガイドを提供する理由を示しています。
6. まとめ
このチュートリアルでは、レイトレースの定性的な確認から、 再現可能な性能指標 (FoM) を用いた 光学性能の定量評価 へ移行しました。Cooke triplet を例に、 検出器面統計が視覚的なレイプロットを超えて 像品質を客観的に記述することを示しました。
S-plane と高速最適化ワークフローを用いて、
検出器オフセット、スポットサイズ σx/σy、RMS スポット半径、スポット共分散、楕円
パラメータ、包囲エネルギー半径 (EE50–EE99)、ハローエネルギー分率、包囲エネルギー
勾配、およびエネルギー集中比といった指標を使って
optimizer_output.csv により設計バリエーションを生成・順位付けしました。また、これらの数値指標を
検出器画像、RGB 合成像、および波長分解スナップショットと関連付けることで、色収差
ぼけ、エネルギー集中、および迷光挙動を明らかにしました。
最後に、レンズ形状を直接変更し、その結果得られる性能指標を再評価することで、 基本的な解析ループを示しました。すなわち、物理パラメータを変更し、 シミュレーションを再実行し、FoM を比較し、検出器および 3D 表示で結果を検証する という流れです。 この指標駆動型ワークフローは、単純なレンズ系から複雑な光学設計へ自然に拡張でき、 OghmaNano における最適化および公差解析の堅牢な基盤を提供します。
💡 次のステップ: この FoM チュートリアルの後は、 Optical detectors、 Light sources、 または microlens and optical filtering demo といった関連光学ページを調べて、検出器設定、サンプリング、および系形状が同じ性能指標へどのように影響するかを確認してみてください。